ROS

发布于 2021-03-28
Gazebo仿真环境加载模型错误,卡在启动页面:Spawn service failed. Exiting 解决办法
发布于 2021-03-26
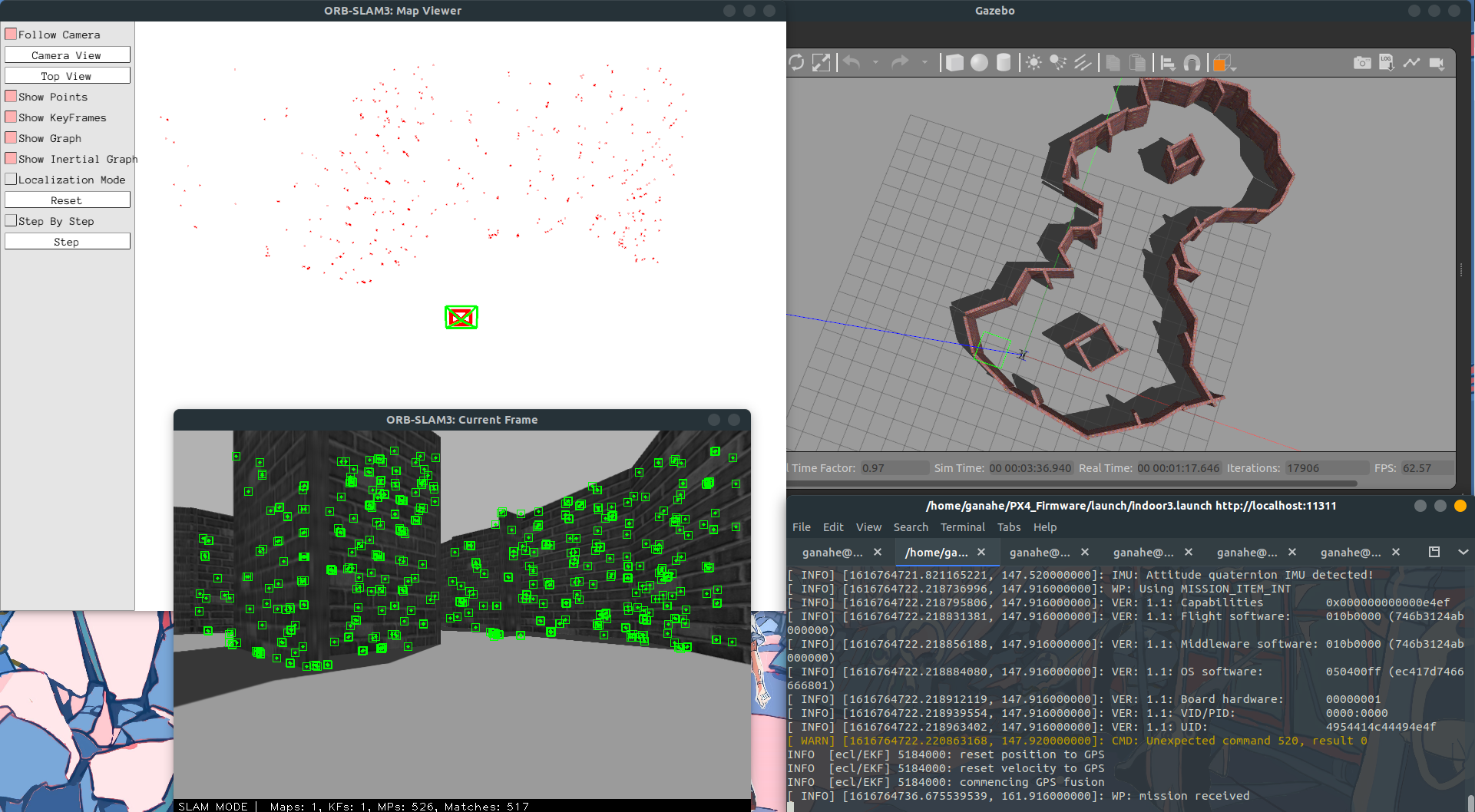
【无人机自主导航6 SLAM】虚拟仿真环境Gazebo实现ORB-SLAM3及rosbag记录复现
发布于 2021-03-21
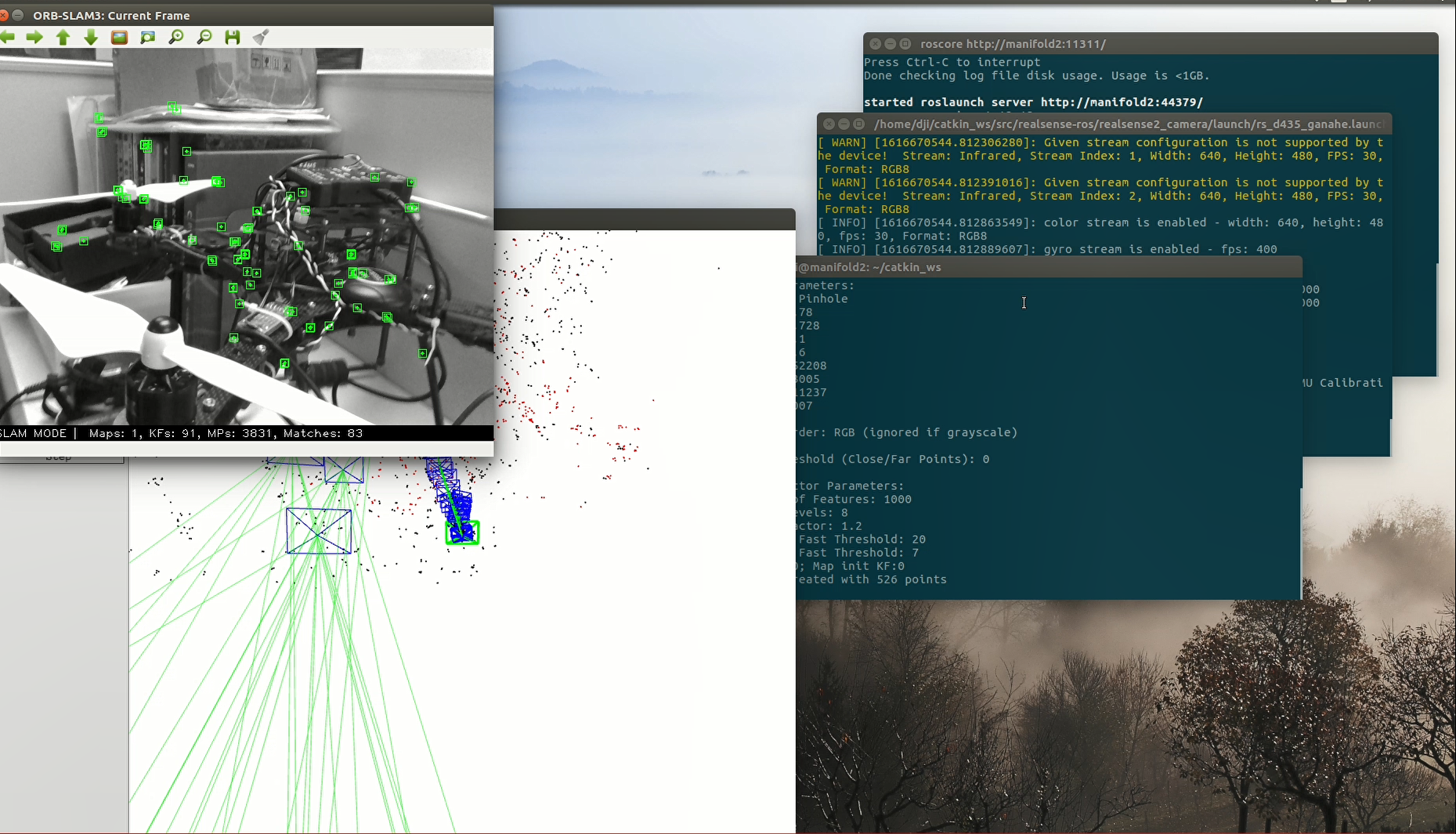
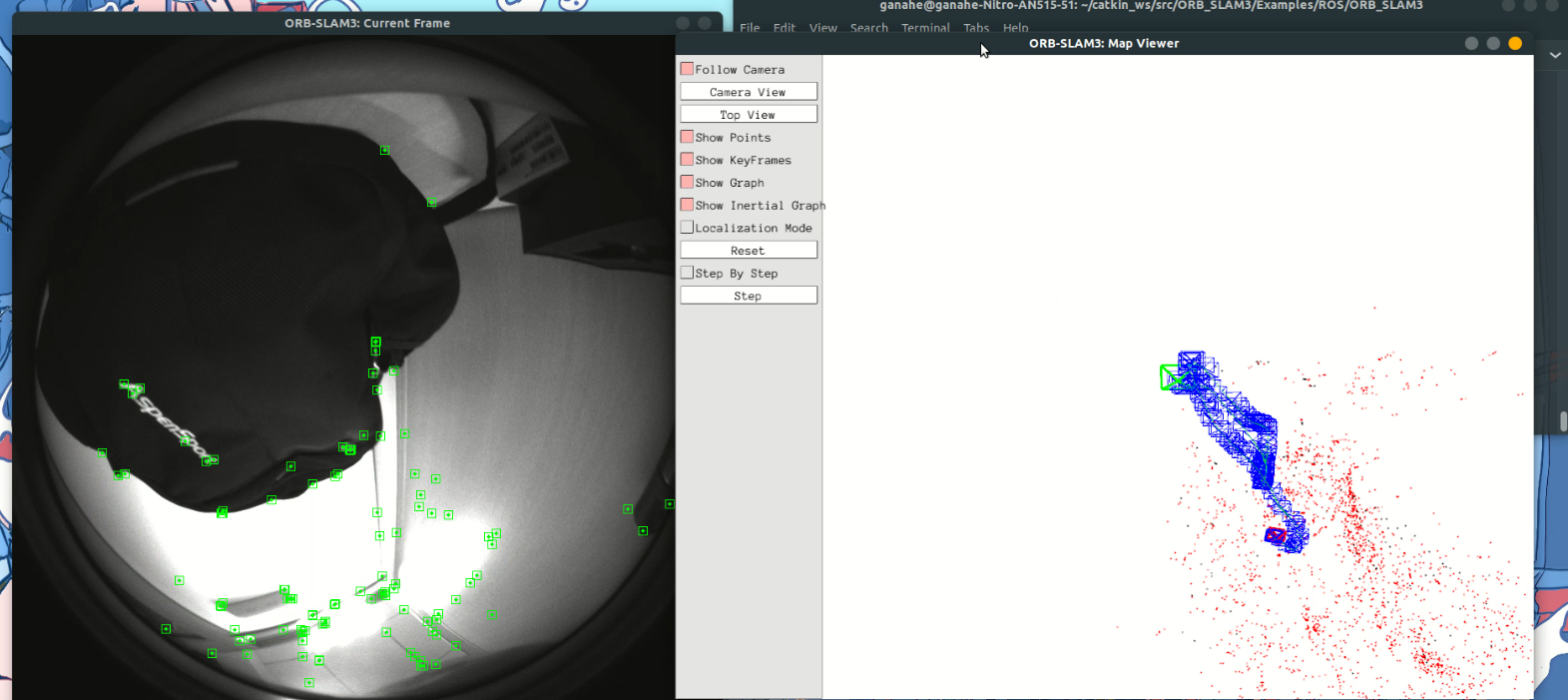
【无人机自主导航5 SLAM】Intel Realsense T265C双目相机实现ORB-SLAM3
发布于 2021-03-21
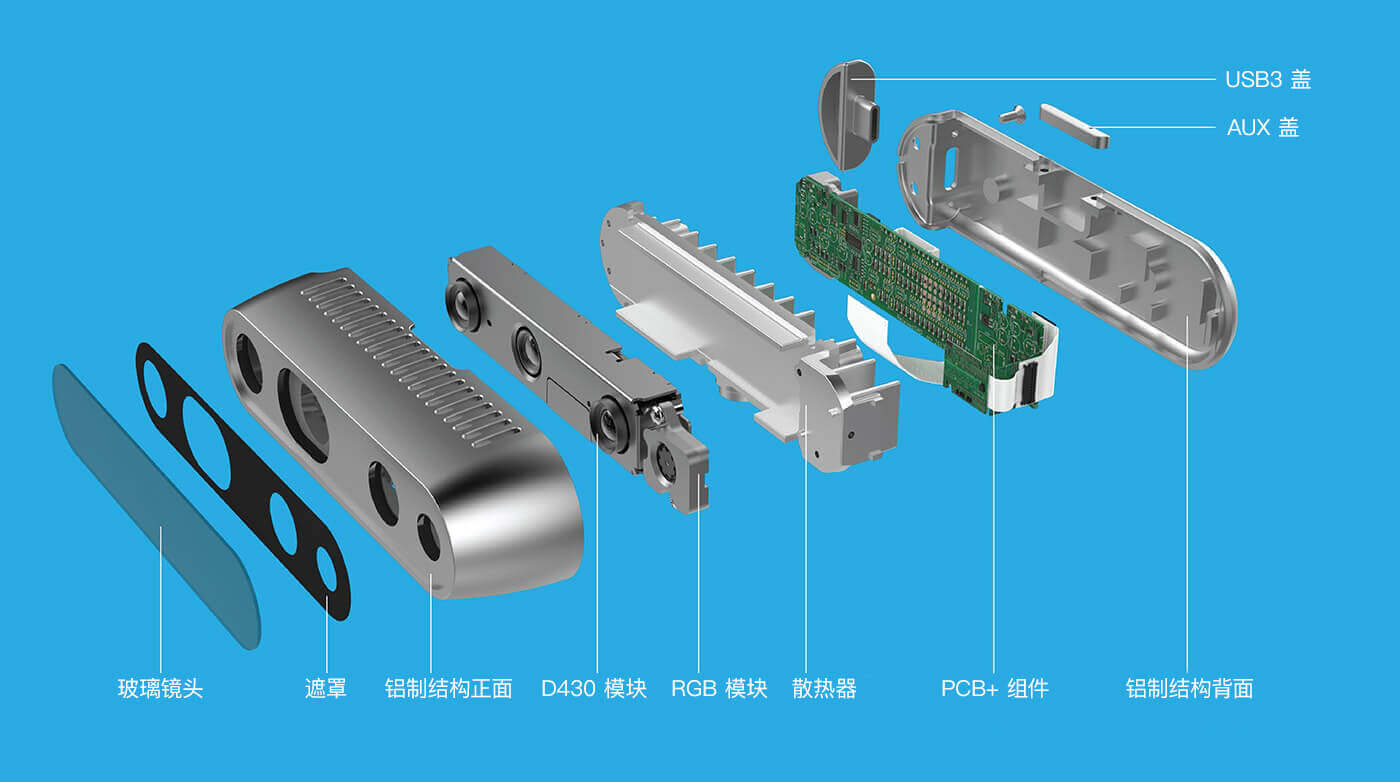
【无人机自主导航4 视觉传感器】通过ROS发布、订阅话题连接Realsense视觉相机
发布于 2021-03-19
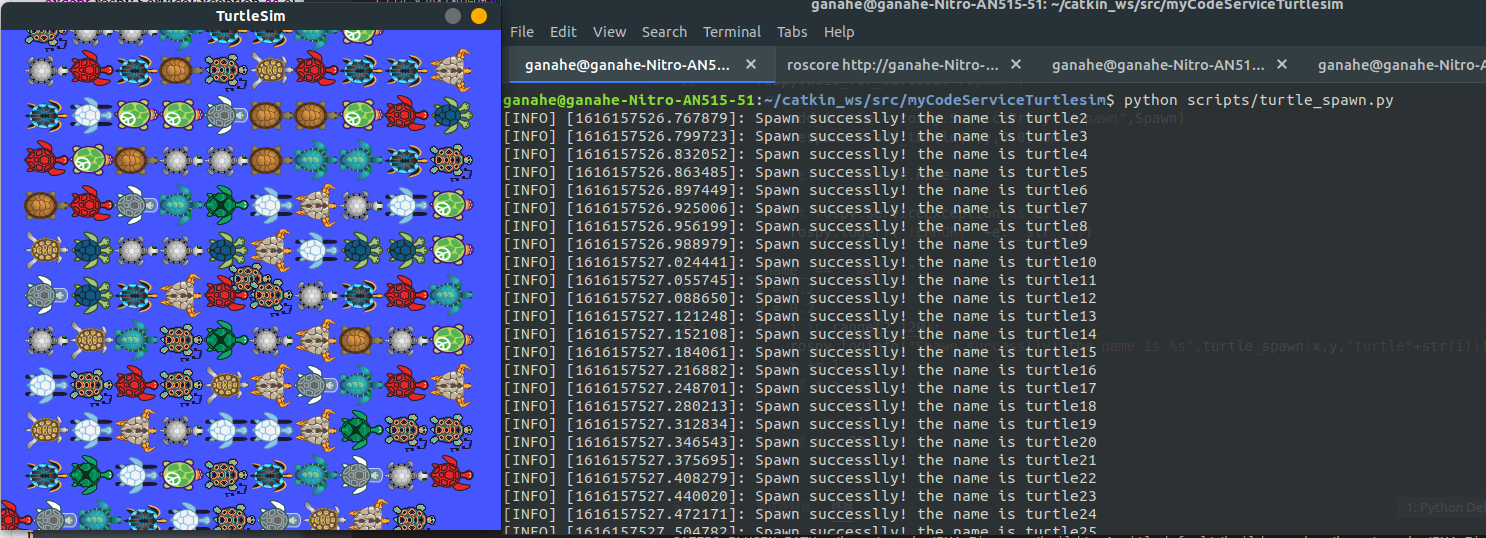
ROS学习-将官方turtlesim的turtle乌龟全部列出
发布于 2021-03-19