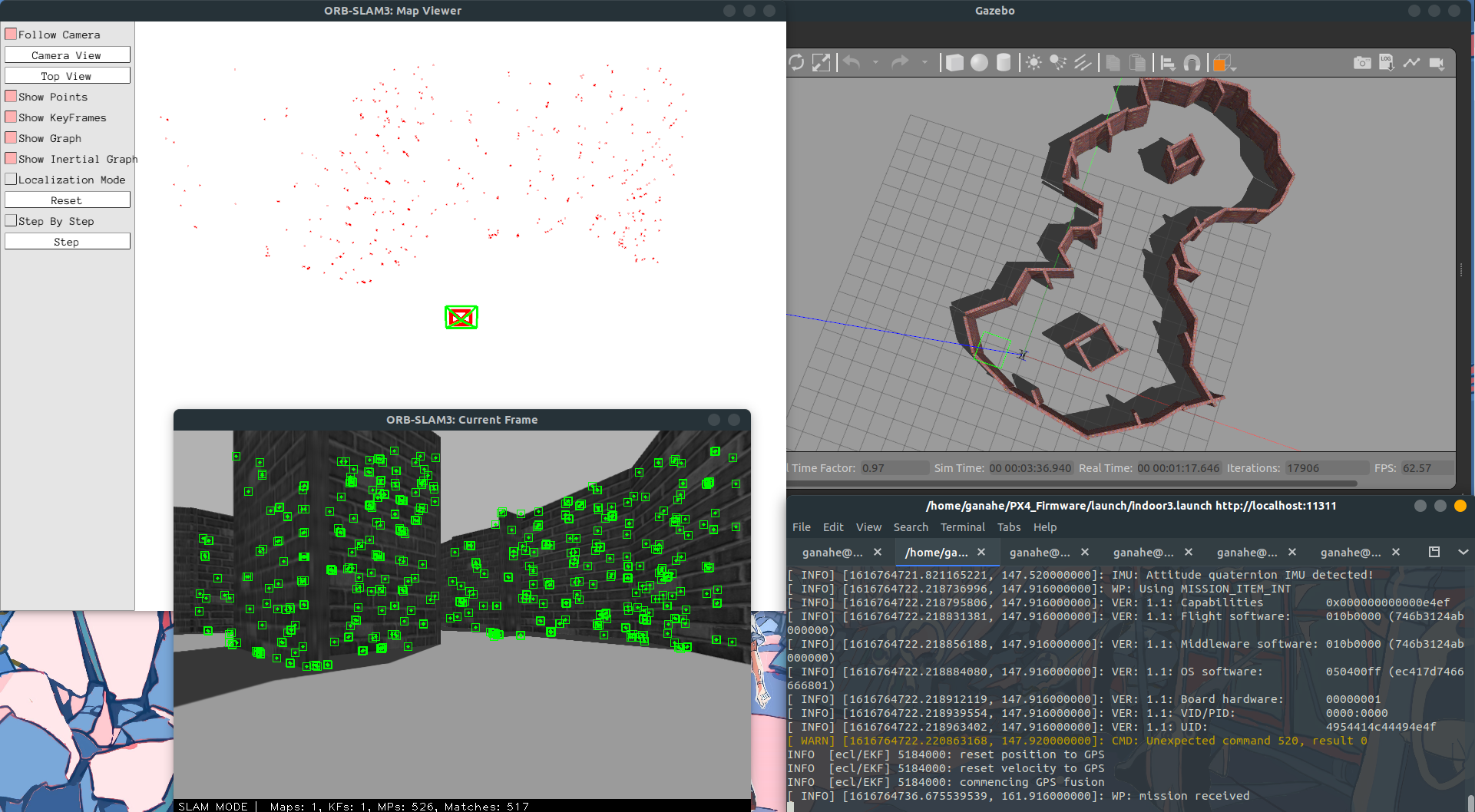
发布于 2021-03-26 【无人机自主导航6 SLAM】虚拟仿真环境Gazebo实现ORB-SLAM3及rosbag记录复现 GanAHE 717 热度 无~ Linux 一、依赖配置 在本站文章【无人机自主导航3-ORB-SLAM2】Gazebo仿真环境下的视觉SLAM已说明配置信息,基本相同,不再 …
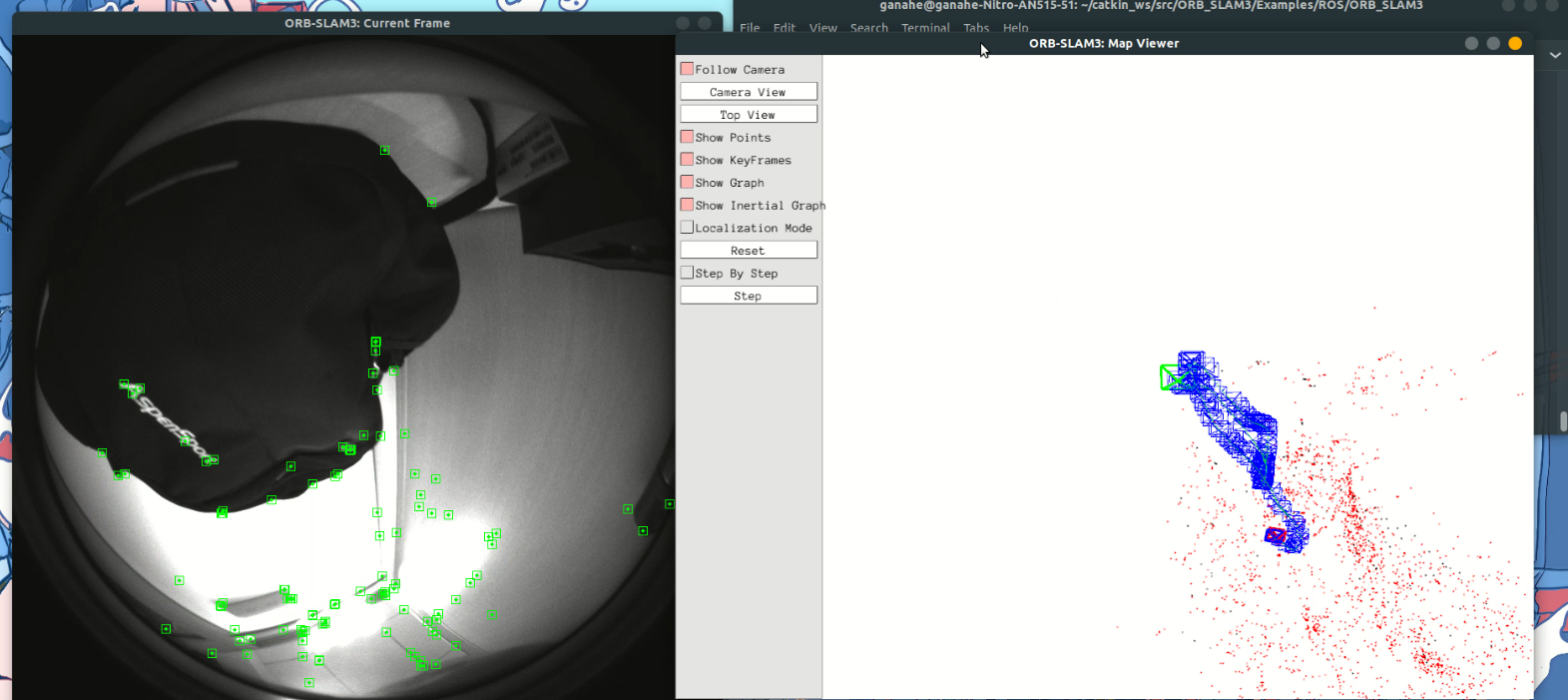
发布于 2021-03-21 【无人机自主导航5 SLAM】Intel Realsense T265C双目相机实现ORB-SLAM3 GanAHE 1487 热度 5 条评论 C/C++ 深度相机的SDK驱动安装、ROS功能包编译等内容在本站文章: 【无人机自主导航4-1 视觉传感器】通过ROS发布、订阅话题连接视觉 …