一、视觉传感器概况
视觉传感器是整个机器视觉系统信息的直接来源,主要由一个或者两个图形传感器组成,有时还要配以光投射器及其他辅助设备。视觉传感器的主要功能是获取足够的机器视觉系统要处理的最原始图像。
视觉传感是应用在生产装置上的一种电子图像技术,通过视觉传感器把图像抓到,然后将图像传送至处理单元,通过数字化处理,根据像素分布和亮度、颜色等信息,来进行尺寸、形状和颜色的判别,并根据判别结果进而控制生产设备的工作。 视觉传感器的工作过程可以分为四个步骤:图像的检测、图像的分析、图像的绘制和图像识别。视觉传感器具有从一幅图像中捕获数以千计像素的能力。 视觉信息一般通过光电检测转换为电信号,通过图像信息的变化可以对物体的形状位置等特征信息进行判定。
在SLAM领域,视觉传感器也被广泛应用,衍生出了ORB-SLAM、Vins-Mono等视觉SLAM,用于四足机器人、无人机等的导航与规划等。
二、安装驱动
本机的参数如下:
| 项目 | 版本 |
|---|---|
| 系统 | Ubuntu18.04 |
| ROS | Medolic |
执行如下命令安装驱动:
sudo apt-get install ros-melodic-usb-cam如果为其他版本,将版本名称替换即可,比如sudo apt-get install ros-melodic-usb-cam。
检查usb端口连接信息命令如下:
lsusb
lsusb -t三、开启本地相机并显示
执行如下命令打开本地自带相机:
roslaunch usb_cam usb_cam-test.launch也可以下载uvc驱动包:roslaunch usb_cam uvc_cam-test.launch
执行过程的信息如下:
ganahe@ganahe-Nitro-AN515-51:~$ roslaunch usb_cam usb_cam-test.launch
... logging to /home/ganahe/.ros/log/29a04252-8651-11eb-98ad-f82819b4f653/roslaunch-ganahe-Nitro-AN515-51-8994.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://ganahe-Nitro-AN515-51:44467/
SUMMARY
========
PARAMETERS
* /image_view/autosize: True
* /rosdistro: melodic
* /rosversion: 1.14.10
* /usb_cam/camera_frame_id: usb_cam
* /usb_cam/image_height: 480
* /usb_cam/image_width: 640
* /usb_cam/io_method: mmap
* /usb_cam/pixel_format: yuyv
* /usb_cam/video_device: /dev/video0
NODES
/
image_view (image_view/image_view)
usb_cam (usb_cam/usb_cam_node)
auto-starting new master
process[master]: started with pid [9007]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 29a04252-8651-11eb-98ad-f82819b4f653
process[rosout-1]: started with pid [9018]
started core service [/rosout]
process[usb_cam-2]: started with pid [9021]
ERROR: cannot launch node of type [image_view/image_view]: image_view
ROS path [0]=/opt/ros/melodic/share/ros
ROS path [1]=/home/ganahe/catkin_ws/src
ROS path [2]=/opt/ros/melodic/share
ROS path [3]=/home/ganahe/PX4_Firmware
ROS path [4]=/home/ganahe/PX4_Firmware/Tools/sitl_gazebo
[ INFO] [1615896877.578934705]: using default calibration URL
[ INFO] [1615896877.581331953]: camera calibration URL: file:///home/ganahe/.ros/camera_info/head_camera.yaml
[ INFO] [1615896877.581504365]: Unable to open camera calibration file [/home/ganahe/.ros/camera_info/head_camera.yaml]
[ WARN] [1615896877.581570650]: Camera calibration file /home/ganahe/.ros/camera_info/head_camera.yaml not found.
[ INFO] [1615896877.581638602]: Starting 'head_camera' (/dev/video0) at 640x480 via mmap (yuyv) at 30 FPS
[ WARN] [1615896877.806605562]: unknown control 'focus_auto'
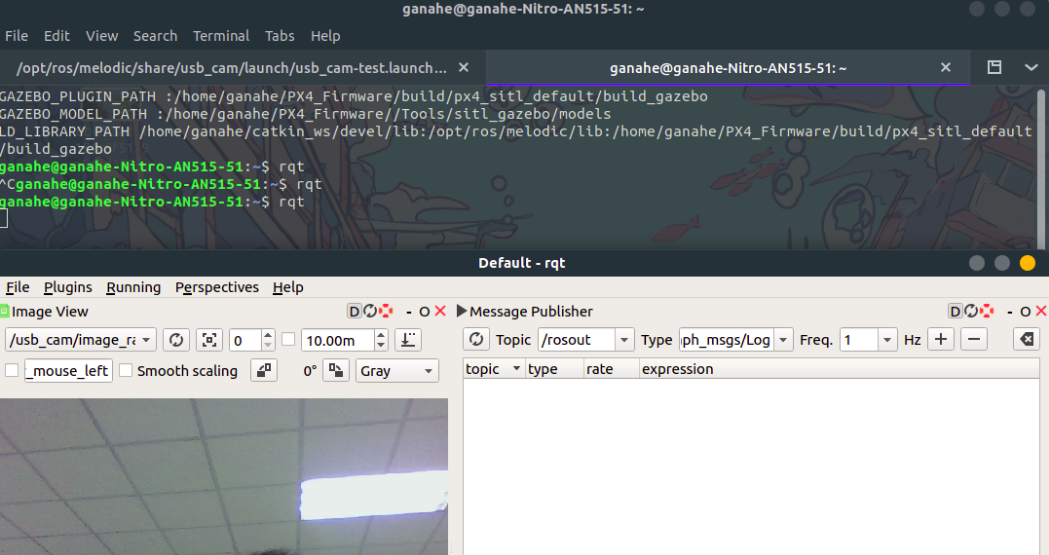
打开rqt工具包:
rqt选择Plugins - visualization - Image View,在出现的界面中的左上角选择对应的已发布话题,即可看到相机打开后的效果:
四、深度相机 - Intel系列
4.1 安装驱动SDK
(1)添加Keys
apt-key adv --keyserver keys.gnupg.net --recv-key C8B3A55A6F3EFCDE || apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key C8B3A55A6F3EFCDE(2)添加Repositories
- Ubuntu 16.04:
add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo xenial main" -u- Ubuntu 18.04:
add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo bionic main" -u(3)安装Libraries
apt-get install librealsense2-dkms
apt-get install librealsense2-utils(4)安装Dev和Debug工具
apt-get install librealsense2-dev
apt-get install librealsense2-dbg(3)(4)步骤也可以一步完成:
sudo apt-get update
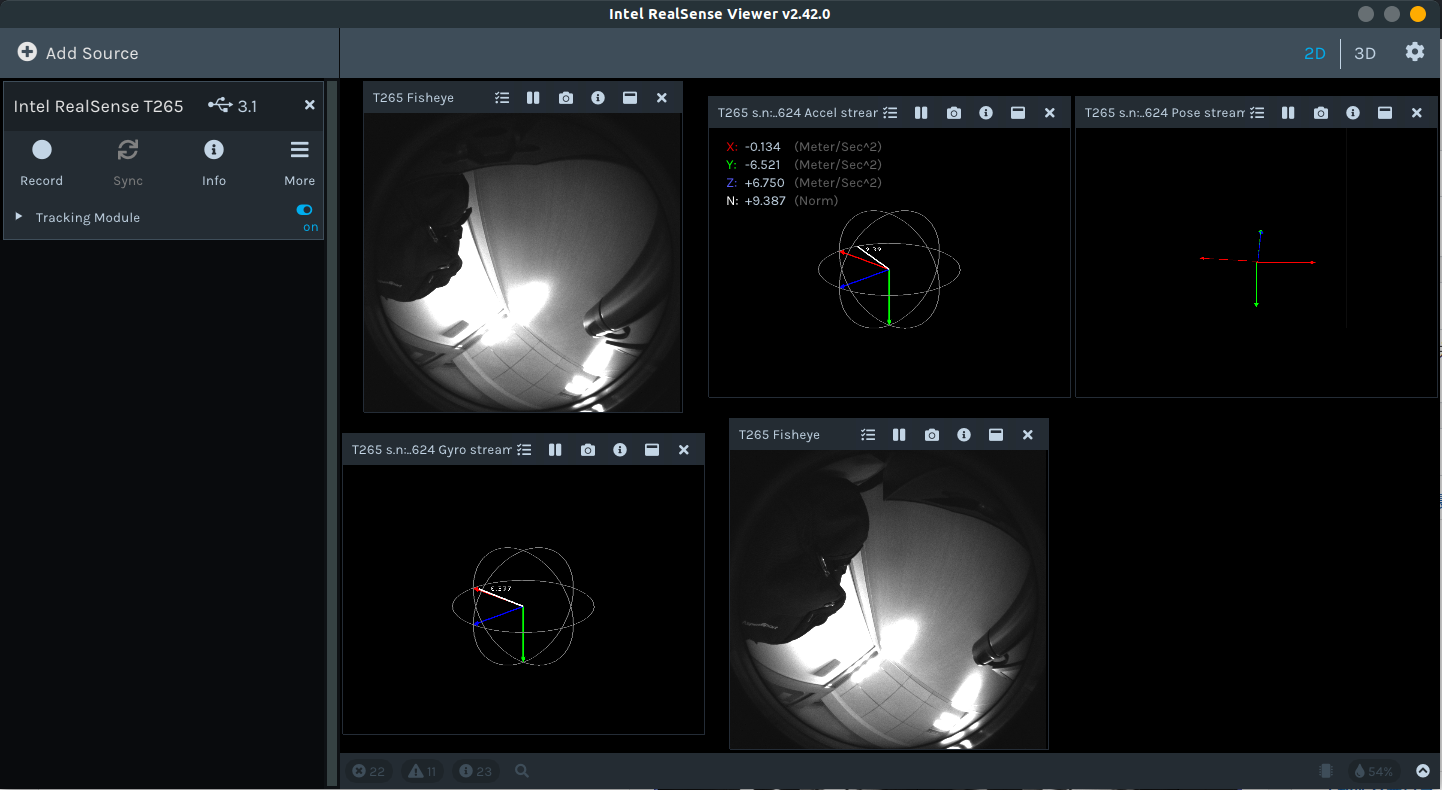
sudo apt-get install librealsense2-dkms librealsense2-utils librealsense2-dev librealsense2-dbg以上驱动安装完成后,可以连接传感器,执行realsense-viewer查看相机成像效果、坐标系等情况。
4.2 安装ROS功能包
cd ~/catkin_ws/src
sudo apt-get install ros-melodic-ddynamic-reconfigure # Ubuntu其他版本自行替换掉melodic
git clone https://github.com/IntelRealSense/realsense-ros.git
cd realsense-ros/
git checkout `git tag | sort -V | grep -P "^2.\d+\.\d+" | tail -1`
cd ..
catkin_make
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
4.3 Intel realsense 相机ROS话题发布
连接相机后,首先打开一个terminal,执行roscore,再打开新的terminal:
cd ~/catkin_ws
roslaunch realsense2_camera rs_camera.launch执行以上命令后,通过rostopic list查看话题列表,随后通过rviz等订阅相应话题查看。
realsense-ros 预定义的launch如下:
ganahe@ganahe-Nitro-AN515-51:~/catkin_ws/src/realsense-ros/realsense2_camera/launchpwd
/home/ganahe/catkin_ws/src/realsense-ros/realsense2_camera/launch
ganahe@ganahe-Nitro-AN515-51:~/catkin_ws/src/realsense-ros/realsense2_camera/launch tree
.
├── demo_pointcloud.launch
├── demo_t265.launch
├── includes
│ └── nodelet.launch.xml
├── opensource_tracking.launch
├── rs_aligned_depth.launch
├── rs_camera.launch
├── rs_d400_and_t265.launch
├── rs_d435_camera_with_model.launch
├── rs_from_file.launch
├── rs_multiple_devices.launch
├── rs_rgbd.launch
├── rs_rtabmap.launch
└── rs_t265.launch
(1)Intel realsense T265C 双目相机
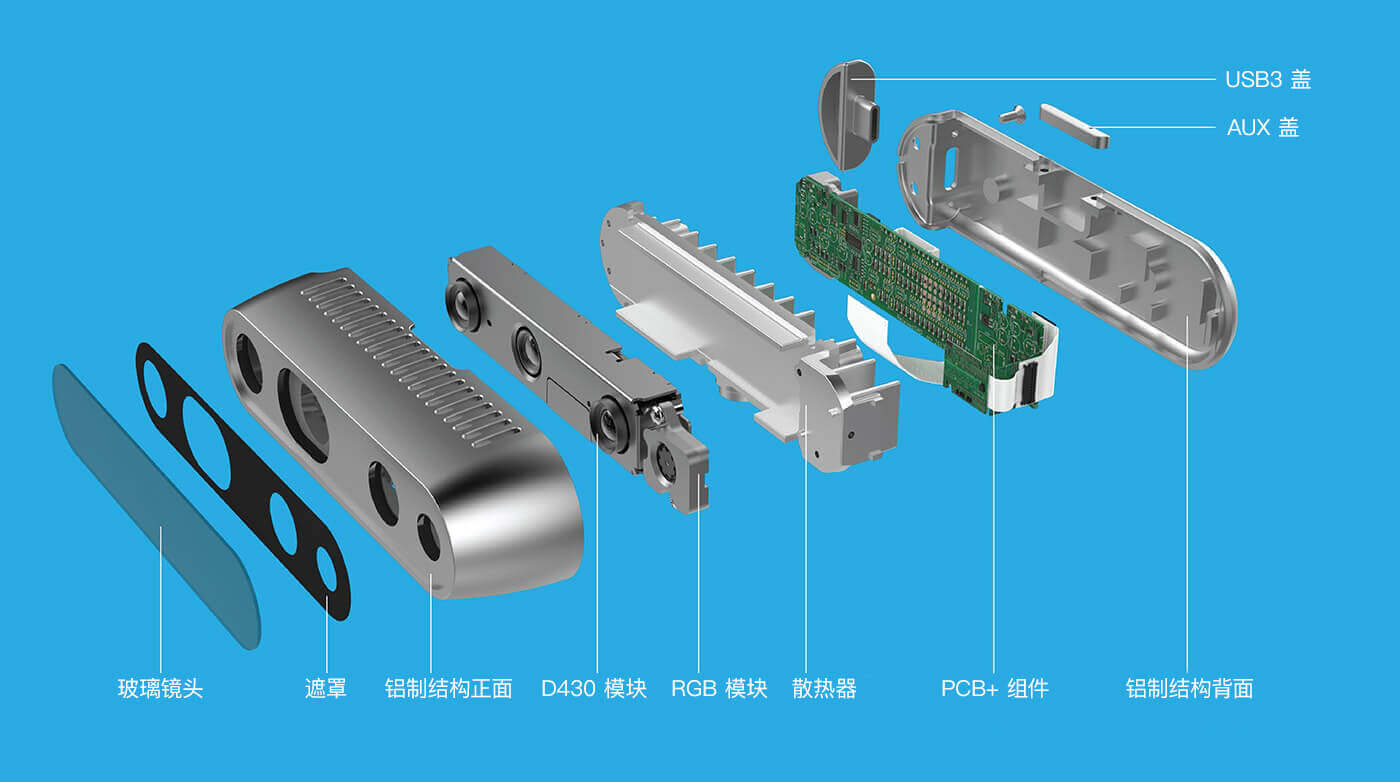
T265 包含两个鱼眼镜头传感器、一个 IMU 和一个英特尔® Movidius™ Myriad™ 2 VPU。所有的 V‑SLAM 算法都直接在 VPU 上运行,能够实现非常低的延迟和非常高效的功耗。
T265 经过广泛的性能测试和验证,在预期使用条件下,闭环偏移小于 1%。姿态动作与动作反射之间的延迟不到 6 毫秒。——Intel

相机的参数信息可以通过如下方式读取:
rs-enumerate-devices # 相机机内参和外参
rs-enumerate-devices -c # 相机机内参和外参 ,以及IMU的参数如果需要通过OpenCV驱动获取数据:
#include <librealsense2/rs.hpp>
#include <opencv2/opencv.hpp>
int main(){
rs2::config cfg;
cfg.enable_stream(RS2_STREAM_FISHEYE,1, RS2_FORMAT_Y8);
cfg.enable_stream(RS2_STREAM_FISHEYE,2, RS2_FORMAT_Y8);
rs2::pipeline pipe;
pipe.start(cfg);
rs2::frameset data;
while (1){
data = pipe.wait_for_frames();
rs2::frame image_left = data.get_fisheye_frame(1);
rs2::frame image_right = data.get_fisheye_frame(2);
if (!image_left || !image_right)
break;
cv::Mat cv_image_left(cv::Size(848, 800), CV_8U, (void*)image_left.get_data(), cv::Mat::AUTO_STEP);
cv::Mat cv_image_right(cv::Size(848, 800), CV_8U, (void*)image_right.get_data(), cv::Mat::AUTO_STEP);
cv::imshow("left", cv_image_left);
cv::imshow("right", cv_image_right);
cv::waitKey(1);
}
return 0;
}
修改CmakeLists.txt:
cmake_minimum_required(VERSION 3.1.0)
project(ganhe)
set(CMAKE_BUILD_TYPE "release")
find_package(OpenCV)
include_directories({OpenCV_INCLUDE_DIRS})
add_executable(ganhe real.cpp)
target_link_libraries(ganhe
realsense2{OpenCV_LIBS}
)
通过Cmake编译后打开生成的可执行文件即可。

dji@manifold2:~/catkin_ws/src/experiment_fast_planner$ rs-enumerate-devices -c
Device info:
Name : Intel RealSense T265
Serial Number : 947122110624
Firmware Version : 0.2.0.951
Physical Port : 2-3-13
Product Id : 0B37
Usb Type Descriptor : 3.1
Product Line : T200
Stream Profiles supported by Tracking Module
Supported modes:
stream resolution fps format
Fisheye 1 848x800 @ 30Hz Y8
Fisheye 2 848x800 @ 30Hz Y8
Gyro N/A @ 200Hz MOTION_XYZ32F
Accel N/A @ 62Hz MOTION_XYZ32F
Pose N/A @ 200Hz 6DOF
Intrinsic Parameters:
Intrinsic of "Fisheye 1" / 848x800 / {Y8}
Width: 848
Height: 800
PPX: 422.355010986328
PPY: 401.183197021484
Fx: 286.419189453125
Fy: 286.384307861328
Distortion: Kannala Brandt4
Coeffs: -0.00842355936765671 0.0438300296664238 -0.0417080596089363 0.00763566605746746 0
FOV (deg): 111.9 x 108.8
Intrinsic of "Fisheye 2" / 848x800 / {Y8}
Width: 848
Height: 800
PPX: 425.490112304688
PPY: 400.023406982422
Fx: 285.90771484375
Fy: 285.838012695312
Distortion: Kannala Brandt4
Coeffs: -0.00901120528578758 0.0463116206228733 -0.0436602495610714 0.00809726025909185 0
FOV (deg): 112 x 108.9
Motion Intrinsic Parameters:
Motion Intrinsic of "Gyro" MOTION_XYZ32F
Bias Variances: 0.000000499999999 0.000000499999999 0.000000499999999
Noise Variances: 0.000005148030141 0.000005148030141 0.000005148030141
Sensitivity :
0.998604 0.000000 0.000000 -0.001043
0.000000 1.003421 0.000000 -0.007766
0.000000 0.000000 0.999840 -0.000505
Motion Intrinsic of "Accel" MOTION_XYZ32F
Bias Variances: 0.000099999997474 0.000099999997474 0.000099999997474
Noise Variances: 0.000066952452471 0.000066952452471 0.000066952452471
Sensitivity :
1.002646 0.000000 0.000000 -0.119967
0.000000 1.027077 0.000000 0.065438
0.000000 0.000000 1.020518 0.021381
Extrinsic Parameters:
Extrinsic from "Fisheye 1" To "Fisheye 1" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Fisheye 1" To "Fisheye 2" :
Rotation Matrix:
0.999977 -0.000860069 -0.0067087
0.000889296 0.99999 0.00435477
0.00670489 -0.00436064 0.999968
Translation Vector: -0.064382404088974 -0.000208481418667361 -0.000129977037431672
Extrinsic from "Fisheye 1" To "Gyro" :
Rotation Matrix:
-0.99996 -0.00301489 0.0084079
0.0030054 -0.999995 -0.00114063
0.0084113 -0.00111532 0.999964
Translation Vector: 0.0106995701789856 -3.21578190778382e-05 -9.0000918135047e-05
Extrinsic from "Fisheye 1" To "Accel" :
Rotation Matrix:
-0.99996 -0.00301489 0.0084079
0.0030054 -0.999995 -0.00114063
0.0084113 -0.00111532 0.999964
Translation Vector: 0.0106995701789856 -3.21578190778382e-05 -9.0000918135047e-05
Extrinsic from "Fisheye 1" To "Pose" :
Rotation Matrix:
0.99996 0.00301489 -0.0084079
0.0030054 -0.999995 -0.00114063
-0.0084113 0.00111532 -0.999964
Translation Vector: -0.0321912094950676 -2.06494059966644e-05 0.000120167809654959
Extrinsic from "Fisheye 2" To "Fisheye 1" :
Rotation Matrix:
0.999977 0.000889296 0.00670489
-0.000860069 0.99999 -0.00436064
-0.0067087 0.00435477 0.999968
Translation Vector: 0.0643819943070412 0.000152539272676222 -0.000301041349302977
Extrinsic from "Fisheye 2" To "Fisheye 2" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Fisheye 2" To "Gyro" :
Rotation Matrix:
-0.999991 -0.00386751 0.00171616
0.00387305 -0.999987 0.00324017
0.00170361 0.00324679 0.999993
Translation Vector: -0.0536828488111496 9.14099109650124e-06 0.00015033470117487
Extrinsic from "Fisheye 2" To "Accel" :
Rotation Matrix:
-0.999991 -0.00386751 0.00171616
0.00387305 -0.999987 0.00324017
0.00170361 0.00324679 0.999993
Translation Vector: -0.0536828488111496 9.14099109650124e-06 0.00015033470117487
Extrinsic from "Fisheye 2" To "Pose" :
Rotation Matrix:
0.999991 0.00386751 -0.00171616
0.00387305 -0.999987 0.00324017
-0.00170361 -0.00324679 -0.999993
Translation Vector: 0.0321912094950676 2.0649404177675e-05 -0.000120167809654959
Extrinsic from "Gyro" To "Fisheye 1" :
Rotation Matrix:
-0.99996 0.0030054 0.0084113
-0.00301489 -0.999995 -0.00111532
0.0084079 -0.00114063 0.999964
Translation Vector: 0.0106999967247248 0 4.36557456851006e-11
Extrinsic from "Gyro" To "Fisheye 2" :
Rotation Matrix:
-0.999991 0.00387305 0.00170361
-0.00386751 -0.999987 0.00324679
0.00171616 0.00324017 0.999993
Translation Vector: -0.0536826550960541 -0.000198965979507193 -5.82347420277074e-05
Extrinsic from "Gyro" To "Gyro" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Gyro" To "Accel" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: -0 -0 -0
Extrinsic from "Gyro" To "Pose" :
Rotation Matrix:
-1 -0 -0
0 1 0
-0 -0 -1
Translation Vector: -0.021491639316082 1.15084130811738e-05 3.01668951578904e-05
Extrinsic from "Accel" To "Fisheye 1" :
Rotation Matrix:
-0.99996 0.0030054 0.0084113
-0.00301489 -0.999995 -0.00111532
0.0084079 -0.00114063 0.999964
Translation Vector: 0.0106999967247248 0 4.36557456851006e-11
Extrinsic from "Accel" To "Fisheye 2" :
Rotation Matrix:
-0.999991 0.00387305 0.00170361
-0.00386751 -0.999987 0.00324679
0.00171616 0.00324017 0.999993
Translation Vector: -0.0536826550960541 -0.000198965979507193 -5.82347420277074e-05
Extrinsic from "Accel" To "Gyro" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Accel" To "Accel" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Accel" To "Pose" :
Rotation Matrix:
-1 -0 -0
0 1 0
-0 -0 -1
Translation Vector: -0.021491639316082 1.15084130811738e-05 3.01668951578904e-05
Extrinsic from "Pose" To "Fisheye 1" :
Rotation Matrix:
0.99996 0.0030054 -0.0084113
0.00301489 -0.999995 0.00111532
-0.0084079 -0.00114063 -0.999964
Translation Vector: 0.0321909971535206 7.6269636338111e-05 -0.000150520674651489
Extrinsic from "Pose" To "Fisheye 2" :
Rotation Matrix:
0.999991 0.00387305 -0.00170361
0.00386751 -0.999987 -0.00324679
-0.00171616 0.00324017 -0.999993
Translation Vector: -0.032191202044487 -0.000104240716609638 -6.49885187158361e-05
Extrinsic from "Pose" To "Gyro" :
Rotation Matrix:
-1 0 -0
-0 1 -0
-0 0 -1
Translation Vector: -0.021491639316082 -1.15084130811738e-05 3.01668951578904e-05
Extrinsic from "Pose" To "Accel" :
Rotation Matrix:
-1 0 -0
-0 1 -0
-0 0 -1
Translation Vector: -0.021491639316082 -1.15084130811738e-05 3.01668951578904e-05
Extrinsic from "Pose" To "Pose" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0 (2) Intel realsense D435i RGB-D 相机
Intel RealSense D435i是英特尔公司推出的一款消费级深度相机,构成单元有RGB相机(1)、红外相机(2)以及红外发射器(1),相比于D435,D435i还有一个IMU单元。
其深度成像原理是主动立体红外成像,不是传统意义上理解的双目RGB相机成像。
通过ROS功能包的launch文件配置,可以启用D435i不同的镜头,比如可做一个RGB-D传感器相机,可以搭配ORB-SLAM中RGB-D的模式进行使用;也可以只用单目RGB影像,以单目SLAM模式运行,或者单目结合IMU,以Mono-Initial模式运行;可以获取双目的红外影像,以此作为输入,进行双目SLAM。
D435i是一个比较“全能”的传感器,可以进行单目、单目+IMU、双目、双目+IMU、RGB-D的相关应用。但由于两个红外相机是单通道的,不能运行的是双目RGB模式。
Intrinsic Parameters:
Intrinsic of "Depth" / 256x144 / {Z16}
Width: 256
Height: 144
PPX: 125.079650878906
PPY: 70.8781127929688
Fx: 639.974304199219
Fy: 639.974304199219
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 22.62 x 12.84
Intrinsic of "Depth" / 424x240 / {Z16}
Width: 424
Height: 240
PPX: 211.032638549805
PPY: 119.628372192383
Fx: 211.991485595703
Fy: 211.991485595703
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90 x 59.02
Intrinsic of "Depth" / 480x270 / {Z16}
Width: 480
Height: 270
PPX: 238.904876708984
PPY: 134.579284667969
Fx: 239.990356445312
Fy: 239.990356445312
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90 x 58.72
Intrinsic of "Depth" / 640x360 / {Z16}
Width: 640
Height: 360
PPX: 318.539825439453
PPY: 179.439056396484
Fx: 319.987152099609
Fy: 319.987152099609
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90 x 58.72
Intrinsic of "Depth" / 640x480 / {Z16}
Width: 640
Height: 480
PPX: 318.247802734375
PPY: 239.326873779297
Fx: 383.984588623047
Fy: 383.984588623047
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 79.61 x 64.01
Intrinsic of "Depth" / 848x100 / {Z16}
Width: 848
Height: 100
PPX: 422.065277099609
PPY: 49.2567443847656
Fx: 423.982971191406
Fy: 423.982971191406
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90 x 13.45
Intrinsic of "Depth" / 848x480 / {Z16}
Width: 848
Height: 480
PPX: 422.065277099609
PPY: 239.256744384766
Fx: 423.982971191406
Fy: 423.982971191406
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90 x 59.02
Intrinsic of "Depth" / 1280x720 / {Z16}
Width: 1280
Height: 720
PPX: 637.079650878906
PPY: 358.878112792969
Fx: 639.974304199219
Fy: 639.974304199219
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90 x 58.72
Intrinsic of "Color" / 320x180 / {YUYV/RGB8/BGR8/RGBA8/BGRA8/Y16}
Width: 320
Height: 180
PPX: 168.642852783203
PPY: 87.4565658569336
Fx: 231.624588012695
Fy: 231.835433959961
Distortion: Inverse Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 69.21 x 42.43
Intrinsic of "Color" / 320x240 / {YUYV/RGB8/BGR8/RGBA8/BGRA8/Y16}
Width: 320
Height: 240
PPX: 171.523803710938
PPY: 116.608749389648
Fx: 308.832763671875
Fy: 309.113891601562
Distortion: Inverse Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 54.72 x 42.43
Intrinsic of "Color" / 424x240 / {YUYV/RGB8/BGR8/RGBA8/BGRA8/Y16}
Width: 424
Height: 240
PPX: 223.523803710938
PPY: 116.608749389648
Fx: 308.832763671875
Fy: 309.113891601562
Distortion: Inverse Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 68.88 x 42.43
Intrinsic of "Color" / 640x360 / {YUYV/RGB8/BGR8/RGBA8/BGRA8/Y16}
Width: 640
Height: 360
PPX: 337.285705566406
PPY: 174.913131713867
Fx: 463.249176025391
Fy: 463.670867919922
Distortion: Inverse Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 69.22 x 42.43
Intrinsic of "Color" / 640x480 / {YUYV/RGB8/BGR8/RGBA8/BGRA8/Y16}
Width: 640
Height: 480
PPX: 343.047607421875
PPY: 233.217498779297
Fx: 617.66552734375
Fy: 618.227783203125
Distortion: Inverse Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 54.72 x 42.43
Intrinsic of "Color" / 848x480 / {YUYV/RGB8/BGR8/RGBA8/BGRA8/Y16}
Width: 848
Height: 480
PPX: 447.047607421875
PPY: 233.217498779297
Fx: 617.66552734375
Fy: 618.227783203125
Distortion: Inverse Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 68.88 x 42.43
Intrinsic of "Color" / 960x540 / {YUYV/RGB8/BGR8/RGBA8/BGRA8/Y16}
Width: 960
Height: 540
PPX: 505.928527832031
PPY: 262.369689941406
Fx: 694.873779296875
Fy: 695.506286621094
Distortion: Inverse Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 69.22 x 42.43
Intrinsic of "Color" / 1280x720 / {YUYV/RGB8/BGR8/RGBA8/BGRA8/Y16}
Width: 1280
Height: 720
PPX: 674.571411132812
PPY: 349.826263427734
Fx: 926.498352050781
Fy: 927.341735839844
Distortion: Inverse Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 69.22 x 42.43
Intrinsic of "Color" / 1920x1080 / {YUYV/RGB8/BGR8/RGBA8/BGRA8/Y16/RAW16}
Width: 1920
Height: 1080
PPX: 1011.85705566406
PPY: 524.739379882812
Fx: 1389.74755859375
Fy: 1391.01257324219
Distortion: Inverse Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 69.22 x 42.43
Intrinsic of "Infrared 1" / 256x144 / {Y8}
Width: 256
Height: 144
PPX: 125.079650878906
PPY: 70.8781127929688
Fx: 639.974304199219
Fy: 639.974304199219
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 22.62 x 12.84
Intrinsic of "Infrared 1" / 424x240 / {Y8}
Width: 424
Height: 240
PPX: 211.032638549805
PPY: 119.628372192383
Fx: 211.991485595703
Fy: 211.991485595703
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90 x 59.02
Intrinsic of "Infrared 1" / 480x270 / {Y8}
Width: 480
Height: 270
PPX: 238.904876708984
PPY: 134.579284667969
Fx: 239.990356445312
Fy: 239.990356445312
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90 x 58.72
Intrinsic of "Infrared 1" / 640x360 / {Y8}
Width: 640
Height: 360
PPX: 318.539825439453
PPY: 179.439056396484
Fx: 319.987152099609
Fy: 319.987152099609
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90 x 58.72
Intrinsic of "Infrared 1" / 640x480 / {Y8}
Width: 640
Height: 480
PPX: 318.247802734375
PPY: 239.326873779297
Fx: 383.984588623047
Fy: 383.984588623047
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 79.61 x 64.01
Intrinsic of "Infrared 1" / 848x100 / {Y8}
Width: 848
Height: 100
PPX: 422.065277099609
PPY: 49.2567443847656
Fx: 423.982971191406
Fy: 423.982971191406
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90 x 13.45
Intrinsic of "Infrared 1" / 848x480 / {Y8}
Width: 848
Height: 480
PPX: 422.065277099609
PPY: 239.256744384766
Fx: 423.982971191406
Fy: 423.982971191406
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90 x 59.02
Intrinsic of "Infrared 1" / 1280x720 / {Y8}
Width: 1280
Height: 720
PPX: 637.079650878906
PPY: 358.878112792969
Fx: 639.974304199219
Fy: 639.974304199219
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90 x 58.72
Intrinsic of "Infrared 1" / 1280x800 / {Y8}
Width: 1280
Height: 800
PPX: 637.079650878906
PPY: 398.878112792969
Fx: 639.974304199219
Fy: 639.974304199219
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90 x 64.01
Intrinsic of "Infrared 2" / 256x144 / {Y8}
Width: 256
Height: 144
PPX: 125.079650878906
PPY: 70.8781127929688
Fx: 639.974304199219
Fy: 639.974304199219
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 22.62 x 12.84
Intrinsic of "Infrared 2" / 424x240 / {Y8}
Width: 424
Height: 240
PPX: 211.032638549805
PPY: 119.628372192383
Fx: 211.991485595703
Fy: 211.991485595703
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90 x 59.02
Intrinsic of "Infrared 2" / 480x270 / {Y8}
Width: 480
Height: 270
PPX: 238.904876708984
PPY: 134.579284667969
Fx: 239.990356445312
Fy: 239.990356445312
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90 x 58.72
Intrinsic of "Infrared 2" / 640x360 / {Y8}
Width: 640
Height: 360
PPX: 318.539825439453
PPY: 179.439056396484
Fx: 319.987152099609
Fy: 319.987152099609
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90 x 58.72
Intrinsic of "Infrared 2" / 640x480 / {Y8}
Width: 640
Height: 480
PPX: 318.247802734375
PPY: 239.326873779297
Fx: 383.984588623047
Fy: 383.984588623047
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 79.61 x 64.01
Intrinsic of "Infrared 2" / 848x100 / {Y8}
Width: 848
Height: 100
PPX: 422.065277099609
PPY: 49.2567443847656
Fx: 423.982971191406
Fy: 423.982971191406
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90 x 13.45
Intrinsic of "Infrared 2" / 848x480 / {Y8}
Width: 848
Height: 480
PPX: 422.065277099609
PPY: 239.256744384766
Fx: 423.982971191406
Fy: 423.982971191406
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90 x 59.02
Intrinsic of "Infrared 2" / 1280x720 / {Y8}
Width: 1280
Height: 720
PPX: 637.079650878906
PPY: 358.878112792969
Fx: 639.974304199219
Fy: 639.974304199219
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90 x 58.72
Intrinsic of "Infrared 2" / 1280x800 / {Y8}
Width: 1280
Height: 800
PPX: 637.079650878906
PPY: 398.878112792969
Fx: 639.974304199219
Fy: 639.974304199219
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90 x 64.01
Motion Intrinsic Parameters:
Motion Intrinsic of "Gyro" MOTION_XYZ32F
Bias Variances: 0.000000000000000 0.000000000000000 0.000000000000000
Noise Variances: 0.000000000000000 0.000000000000000 0.000000000000000
Sensitivity :
1.000000 0.000000 0.000000 0.000000
0.000000 1.000000 0.000000 0.000000
0.000000 0.000000 1.000000 0.000000
Motion Intrinsic of "Accel" MOTION_XYZ32F
Bias Variances: 0.000000000000000 0.000000000000000 0.000000000000000
Noise Variances: 0.000000000000000 0.000000000000000 0.000000000000000
Sensitivity :
1.000000 0.000000 0.000000 0.000000
0.000000 1.000000 0.000000 0.000000
0.000000 0.000000 1.000000 0.000000
Extrinsic Parameters:
Extrinsic from "Depth" To "Depth" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Depth" To "Color" :
Rotation Matrix:
0.99996 -0.00875044 -0.00162848
0.00875017 0.999962 -0.000173136
0.00162993 0.000158879 0.999999
Translation Vector: 0.0149527732282877 0.000543894828297198 0.000474434433272108
Extrinsic from "Depth" To "Infrared 1" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Depth" To "Infrared 2" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Depth" To "Gyro" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: -0.00552000012248755 0.00510000018402934 0.011739999987185
Extrinsic from "Depth" To "Accel" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: -0.00552000012248755 0.00510000018402934 0.011739999987185
Extrinsic from "Color" To "Depth" :
Rotation Matrix:
0.99996 0.00875017 0.00162993
-0.00875044 0.999962 0.000158879
-0.00162848 -0.000173136 0.999999
Translation Vector: -0.014957713894546 -0.000413105968618765 -0.000449989282060415
Extrinsic from "Color" To "Color" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Color" To "Infrared 1" :
Rotation Matrix:
0.99996 0.00875017 0.00162993
-0.00875044 0.999962 0.000158879
-0.00162848 -0.000173136 0.999999
Translation Vector: -0.014957713894546 -0.000413105968618765 -0.000449989282060415
Extrinsic from "Color" To "Infrared 2" :
Rotation Matrix:
0.99996 0.00875017 0.00162993
-0.00875044 0.999962 0.000158879
-0.00162848 -0.000173136 0.999999
Translation Vector: -0.014957713894546 -0.000413105968618765 -0.000449989282060415
Extrinsic from "Color" To "Gyro" :
Rotation Matrix:
0.99996 0.00875017 0.00162993
-0.00875044 0.999962 0.000158879
-0.00162848 -0.000173136 0.999999
Translation Vector: -0.0204777140170336 0.00468689436092973 0.0112900109961629
Extrinsic from "Color" To "Accel" :
Rotation Matrix:
0.99996 0.00875017 0.00162993
-0.00875044 0.999962 0.000158879
-0.00162848 -0.000173136 0.999999
Translation Vector: -0.0204777140170336 0.00468689436092973 0.0112900109961629
Extrinsic from "Infrared 1" To "Depth" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Infrared 1" To "Color" :
Rotation Matrix:
0.99996 -0.00875044 -0.00162848
0.00875017 0.999962 -0.000173136
0.00162993 0.000158879 0.999999
Translation Vector: 0.0149527732282877 0.000543894828297198 0.000474434433272108
Extrinsic from "Infrared 1" To "Infrared 1" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Infrared 1" To "Infrared 2" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: -0.0500373877584934 0 0
Extrinsic from "Infrared 1" To "Gyro" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: -0.00552000012248755 0.00510000018402934 0.011739999987185
Extrinsic from "Infrared 1" To "Accel" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: -0.00552000012248755 0.00510000018402934 0.011739999987185
Extrinsic from "Infrared 2" To "Depth" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0.0500373877584934 0 0
Extrinsic from "Infrared 2" To "Color" :
Rotation Matrix:
0.99996 -0.00875044 -0.00162848
0.00875017 0.999962 -0.000173136
0.00162993 0.000158879 0.999999
Translation Vector: 0.0649881809949875 0.000981730525381863 0.000555992126464844
Extrinsic from "Infrared 2" To "Infrared 1" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0.0500373877584934 0 0
Extrinsic from "Infrared 2" To "Infrared 2" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Infrared 2" To "Gyro" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0.0445173867046833 0.00510000018402934 0.011739999987185
Extrinsic from "Infrared 2" To "Accel" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0.0445173867046833 0.00510000018402934 0.011739999987185
Extrinsic from "Gyro" To "Depth" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0.00552000012248755 -0.00510000018402934 -0.011739999987185
Extrinsic from "Gyro" To "Color" :
Rotation Matrix:
0.99996 -0.00875044 -0.00162848
0.00875017 0.999962 -0.000173136
0.00162993 0.000158879 0.999999
Translation Vector: 0.0205362997949123 -0.0045055765658617 -0.0112573625519872
Extrinsic from "Gyro" To "Infrared 1" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0.00552000012248755 -0.00510000018402934 -0.011739999987185
Extrinsic from "Gyro" To "Infrared 2" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0.00552000012248755 -0.00510000018402934 -0.011739999987185
Extrinsic from "Gyro" To "Gyro" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Gyro" To "Accel" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Accel" To "Depth" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0.00552000012248755 -0.00510000018402934 -0.011739999987185
Extrinsic from "Accel" To "Color" :
Rotation Matrix:
0.99996 -0.00875044 -0.00162848
0.00875017 0.999962 -0.000173136
0.00162993 0.000158879 0.999999
Translation Vector: 0.0205362997949123 -0.0045055765658617 -0.0112573625519872
Extrinsic from "Accel" To "Infrared 1" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0.00552000012248755 -0.00510000018402934 -0.011739999987185
Extrinsic from "Accel" To "Infrared 2" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0.00552000012248755 -0.00510000018402934 -0.011739999987185
Extrinsic from "Accel" To "Gyro" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Accel" To "Accel" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
五、源代码安装 Realsense SDK
通过如上方法无法时
ganahe@ganahe-Nitro-AN515-51:~$ apt-key adv --keyserver keys.gnupg.net --recv-key C8B3A55A6F3EFCDE || apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key C8B3A55A6F3EFCDE
Executing: /tmp/apt-key-gpghome.VDtWItvLze/gpg.1.sh --keyserver keys.gnupg.net --recv-key C8B3A55A6F3EFCDE
gpg: keyserver receive failed: No name
Executing: /tmp/apt-key-gpghome.iikOQE6Ij3/gpg.1.sh --keyserver hkp://keyserver.ubuntu.com:80 --recv-key C8B3A55A6F3EFCDE
gpg: key C8B3A55A6F3EFCDE: ""CN = Intel(R) Intel(R) Realsense", O=Intel Corporation" not changed
gpg: Total number processed: 1
gpg: unchanged: 1
源码编译安装
下面的操作是适用于Ubuntu 16.04其它版本见官网。
先更新系统软件
sudo apt update && sudo apt upgrade
然后安装一些推荐的包,这步如果出错可以不管
sudo apt install --install-recommends linux-generic-lts-xenial xserver-xorg-core-lts-xenial xserver-xorg-lts-xenial xserver-xorg-video-all-lts-xenial xserver-xorg-input-all-lts-xenial libwayland-egl1-mesa-lts-xenial更新完成过后准备重启
sudo update-grub && sudo reboot查看内核是否符合要求内核要求说明
uname -r下载SDK
git clone https://github.com/IntelRealSense/librealsense.git下载完成过后安装依赖
cd librealsense
sudo apt-get install git libssl-dev libusb-1.0-0-dev pkg-config libgtk-3-dev libglfw3-dev添加udev规则
sudo ./scripts/setup_udev_rules.sh安装系统内核补丁
sudo ./scripts/patch-realsense-ubuntu-lts.sh驱动设置开机启动
echo 'hid_sensor_custom' | sudo tee -a /etc/modules创建编译文件夹
mkdir build && cd buildcmake准备编译,同时编译t265和其它一些可能会用的工具
cmake ../ -DCMAKE_BUILD_TYPE=Release -DBUILD_EXAMPLES=true -DBUILD_WITH_TM2=true 然后make安装完成
sudo make uninstall && make clean && make && sudo make install如果没报错就ok了,运行realsense-viewer测试一下能不能打开相机
六、 参考文献
[1]Intel Realsense T265使用教程
[2]Intel RealSense D435i:简介、安装与使用(ROS、Python)
Comments NOTHING