发布于 2022-11-21 测量学基础第七章 地形测量与地形图应用 GanAHE 785 热度 无~ 学习历程 第七章 地形测量与地形图应用 一、基本概念 1.1 地形图概述 1.地物、地貌、地形(序章) 2.地物平面图:将地面上各种地物和平 …
发布于 2022-11-20 测量学基础第六章 控制测量 GanAHE 833 热度 无~ 学习历程 第六章 控制测量 控制测量的目的:在整个测区范围内用比较精密的仪器和严密的方法测定少量大致均匀分布的点位准确位置。其中测量点平面坐 …
发布于 2022-11-20 测量学基础第五章 误差理论与平差基础 GanAHE 749 热度 无~ 学习历程 第五章 误差理论与平差基础 一、误差来源 二、误差传播定律 三、平差模型 间接平差、条件平差等
发布于 2022-11-20 测量学基础第四章 距离测量 GanAHE 807 热度 无~ 学习历程 第四章 距离测量 一、三角高程测量 通过测量倾斜距离(斜距)S计算水平距离(平距)D、垂直距离(垂距)V、以及高差 1.1 近距离 …
发布于 2022-11-20 测量学基础第三章 角度测量 GanAHE 788 热度 无~ 学习历程 第三章 角度测量 一、基本概念 角度观测分为水平角观测和垂直角观测。 水平角:空间两相交直线在水平面上投影所构成的角度; 垂直角: …
发布于 2022-11-20 测量学基础第二章 水准测量 GanAHE 823 热度 无~ 学习历程 第二章 水准测量与水准仪 一、基本概念 1.图根水准测量:为地形测量而进行的水准测量 2.工程水准测量:为工程建设进行的水准测量 …
发布于 2022-11-20 测量学基础 序章一 GanAHE 838 热度 3 条评论 C/C++ 第一章 序章 一、测绘学科概述 可分为大地测量学、摄影测量与遥感学、工程测量学、海洋测量学以及地图制图学。测量学一文主要为测绘学科 …
发布于 2022-10-24 TianqueROS常见错误与解决方案集锦【持续更新】 GanAHE 936 热度 无~ C/C++ 目录 [TOC] 问题 1 apt-get update ROS包报错 W: An error occurred during t …
发布于 2022-10-24 使用阿里云短信服务API实现短信验证码以及短信服务通知 GanAHE 775 热度 无~ Java title: 使用阿里云短信服务API实现短信验证码以及短信服务通知 type: categories copyright: tr …
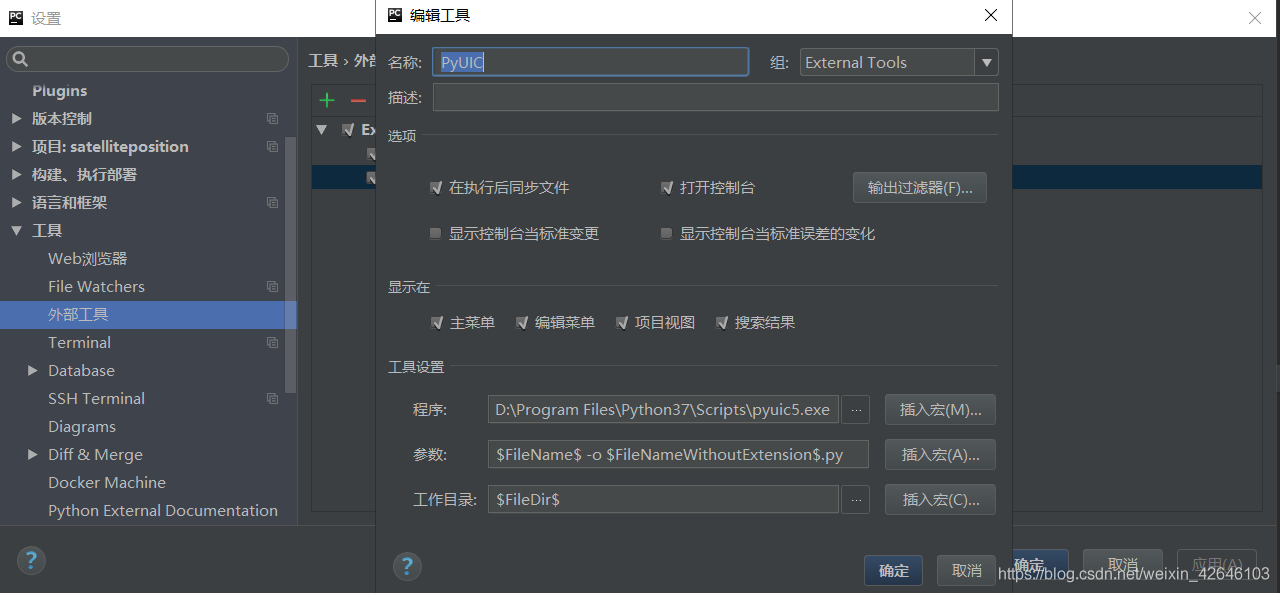
发布于 2022-10-24 在Pychram中配置PyUIC5时文件路径说明与设置 GanAHE 865 热度 无~ Python abbrlink: da8afc03 title: 在Pychram中配置PyUIC5时文件路径说明与设置 related_pos …
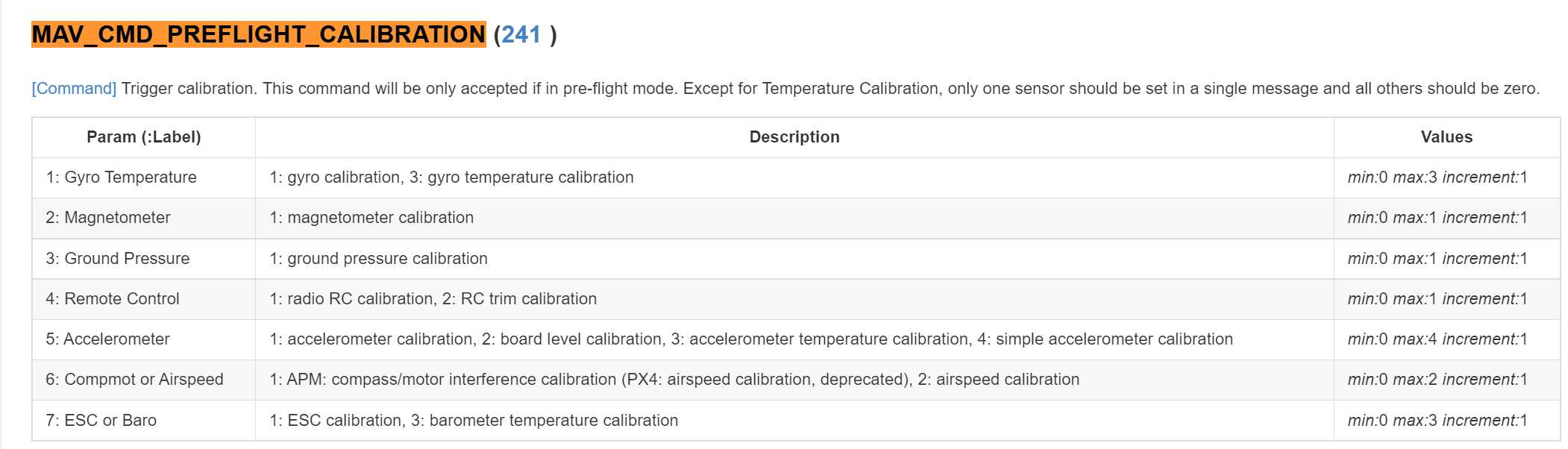
发布于 2022-06-16 PX4无人机传感器校准MavLink指令协议说明 GanAHE 1102 热度 无~ C/C++ X4 是一款专业级飞控, 它由来自业界和学术界的世界级开发商开发,并得到活跃的全球社区的支持。 本文介绍传感器校准的协议说明。
发布于 2022-04-27 Android studio无法连接任务仓库Unknown host ‘不知道这样的主机。 (maven.aliyun.com)’. GanAHE 954 热度 无~ Android Unknown host ‘jcenter.bintray.com’ Unknown host ‘不知道这样的主机。