发布于 2022-10-24 TianqueROS常见错误与解决方案集锦【持续更新】 GanAHE 539 热度 无~ C/C++ 目录 [TOC] 问题 1 apt-get update ROS包报错 W: An error occurred during t …
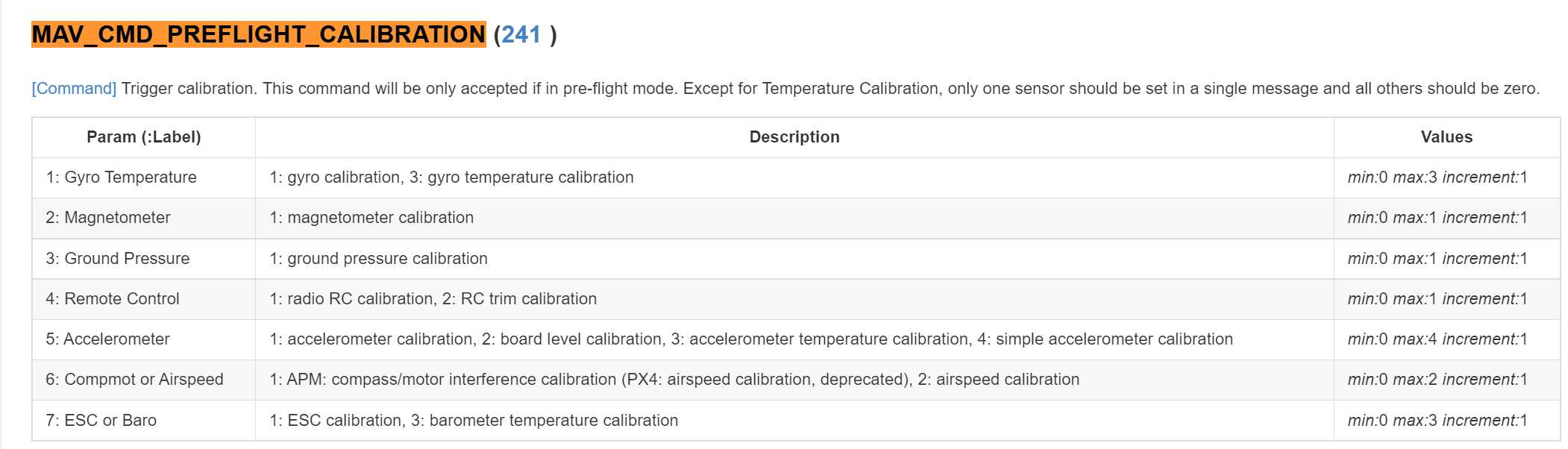
发布于 2022-06-16 PX4无人机传感器校准MavLink指令协议说明 GanAHE 650 热度 无~ C/C++ X4 是一款专业级飞控, 它由来自业界和学术界的世界级开发商开发,并得到活跃的全球社区的支持。 本文介绍传感器校准的协议说明。
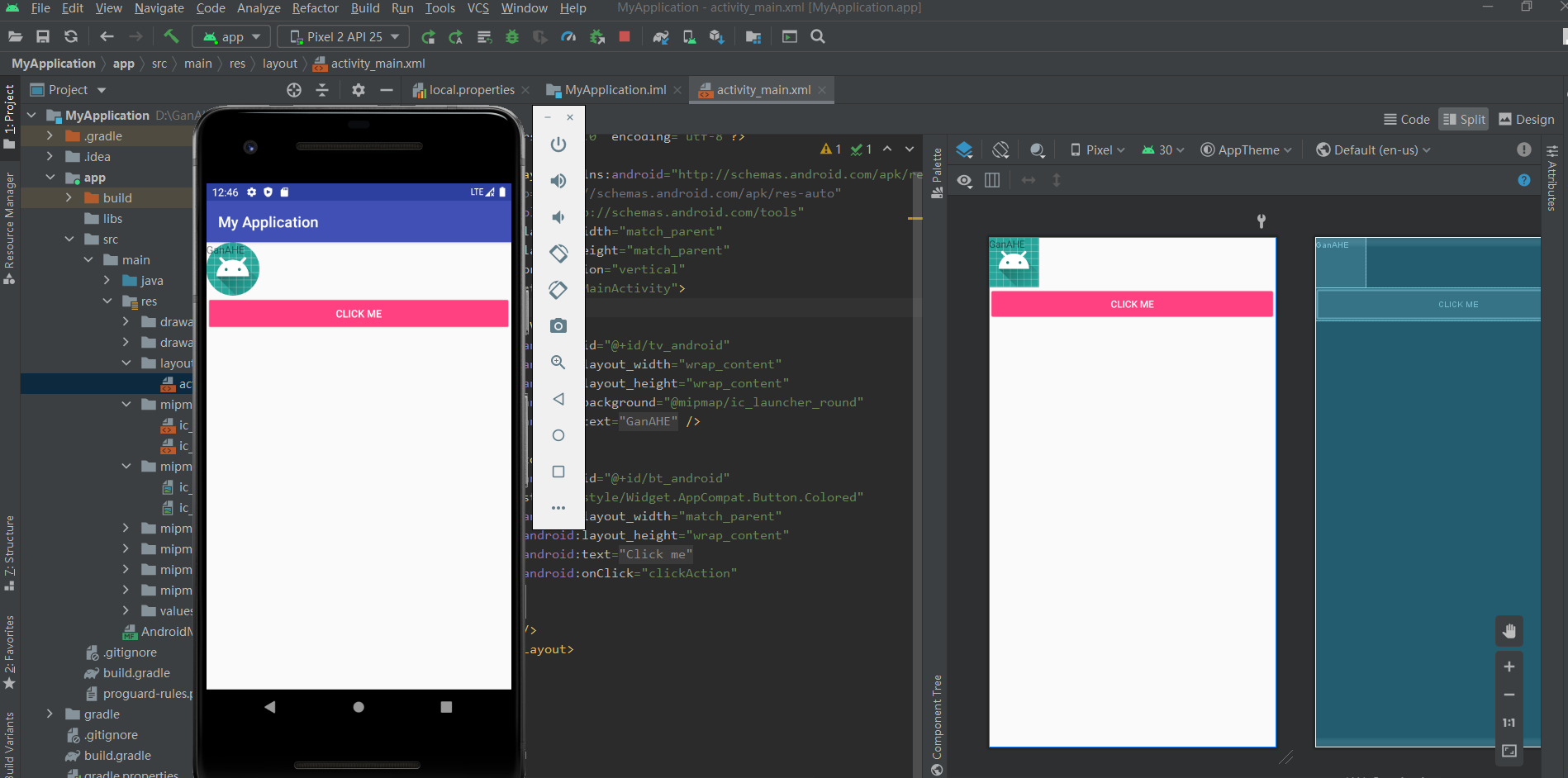
发布于 2021-06-29 【无人机飞行控制软件开发】无人机地面站构成与配置开发 GanAHE 554 热度 无~ Android 一、飞控控制与SDK 飞控是搭载在无人机上的实时姿态处理、控制中心,能够根据内部的加速度计、IMU等模块单元解算 最为出名商业无人 …
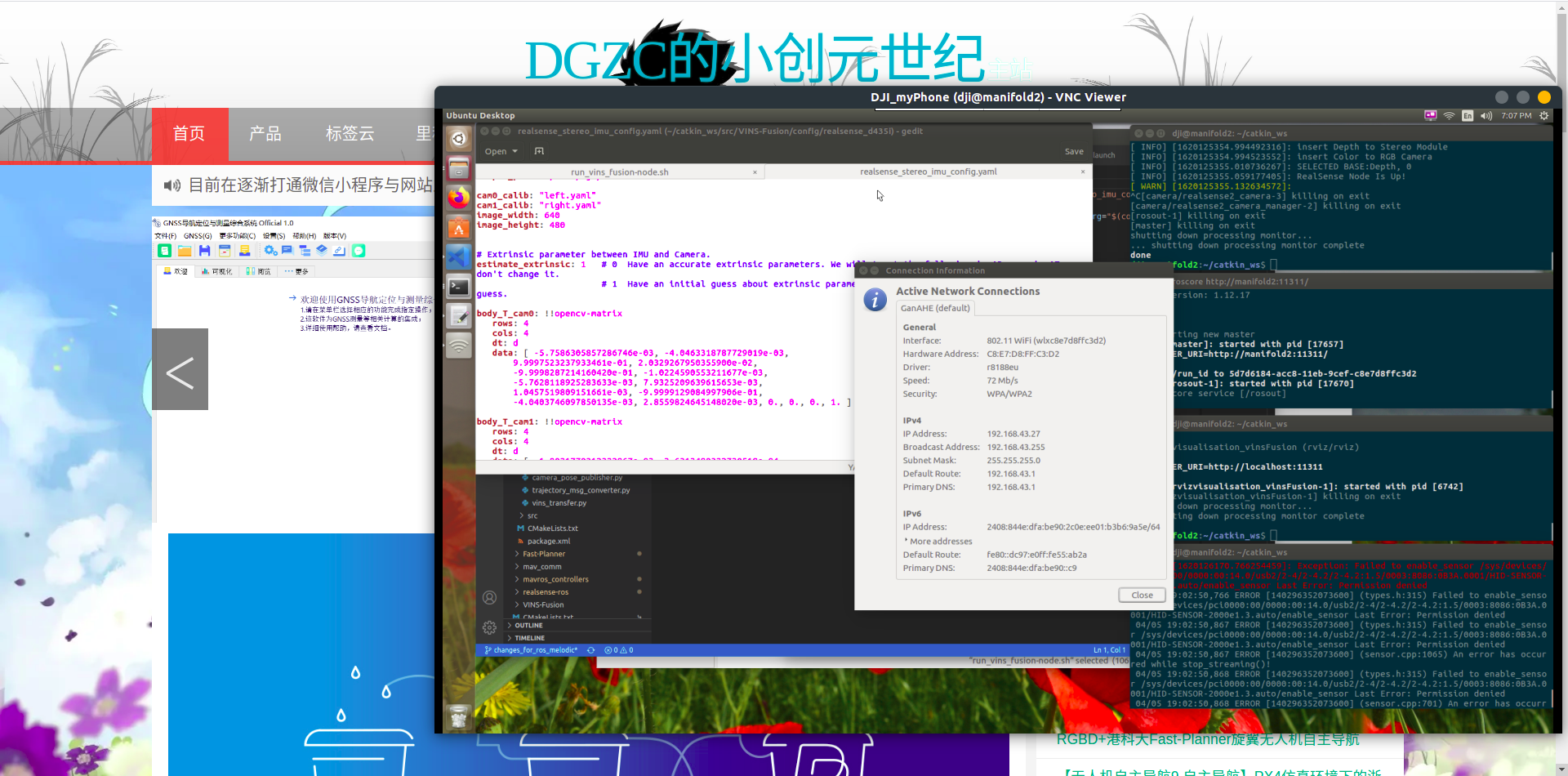
发布于 2021-06-29 无人机自主导航15 自主导航】硬件篇-实机飞行基于VINS-Fusion的D435i视觉惯性里程计方案 GanAHE 653 热度 无~ C/C++ Ceres VINS-Fusion 配置文件 测试跑通
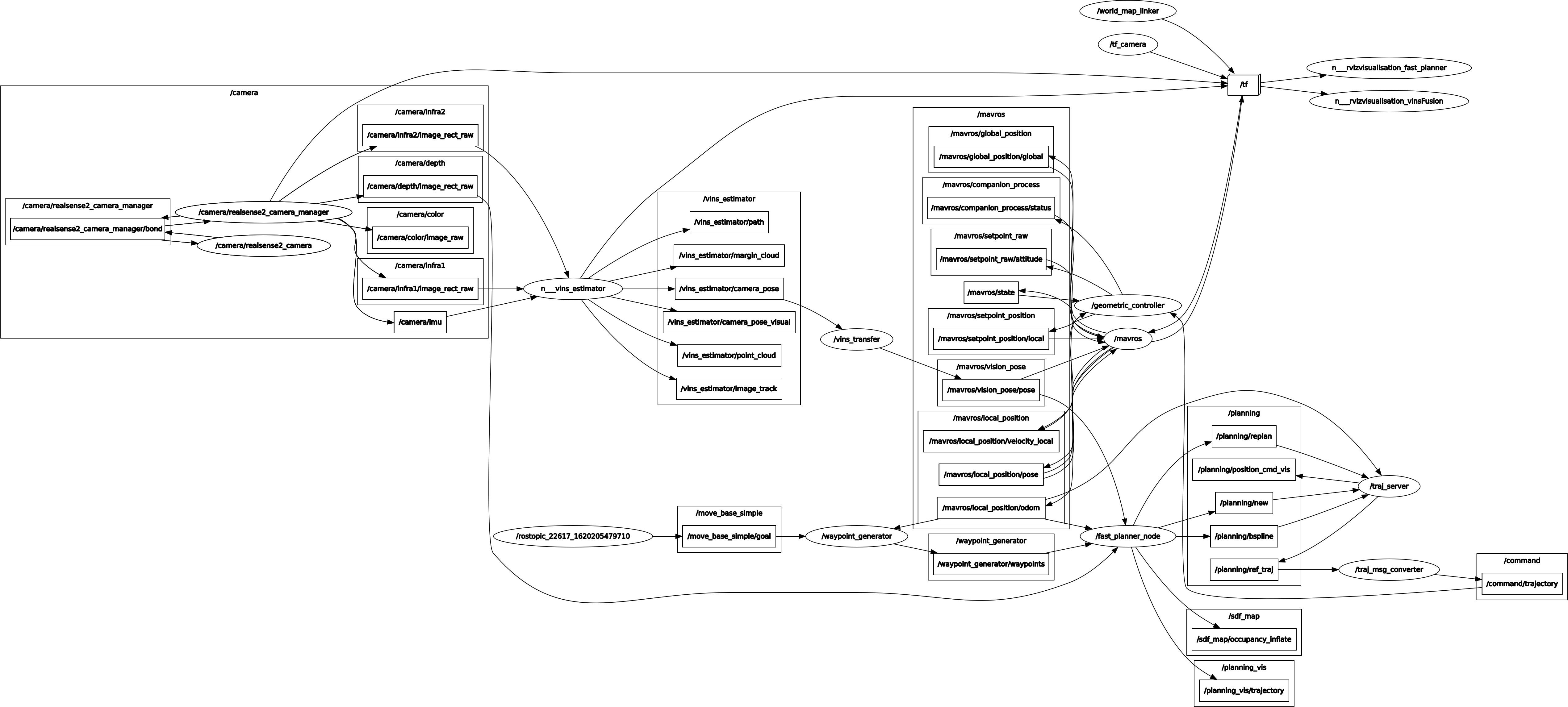
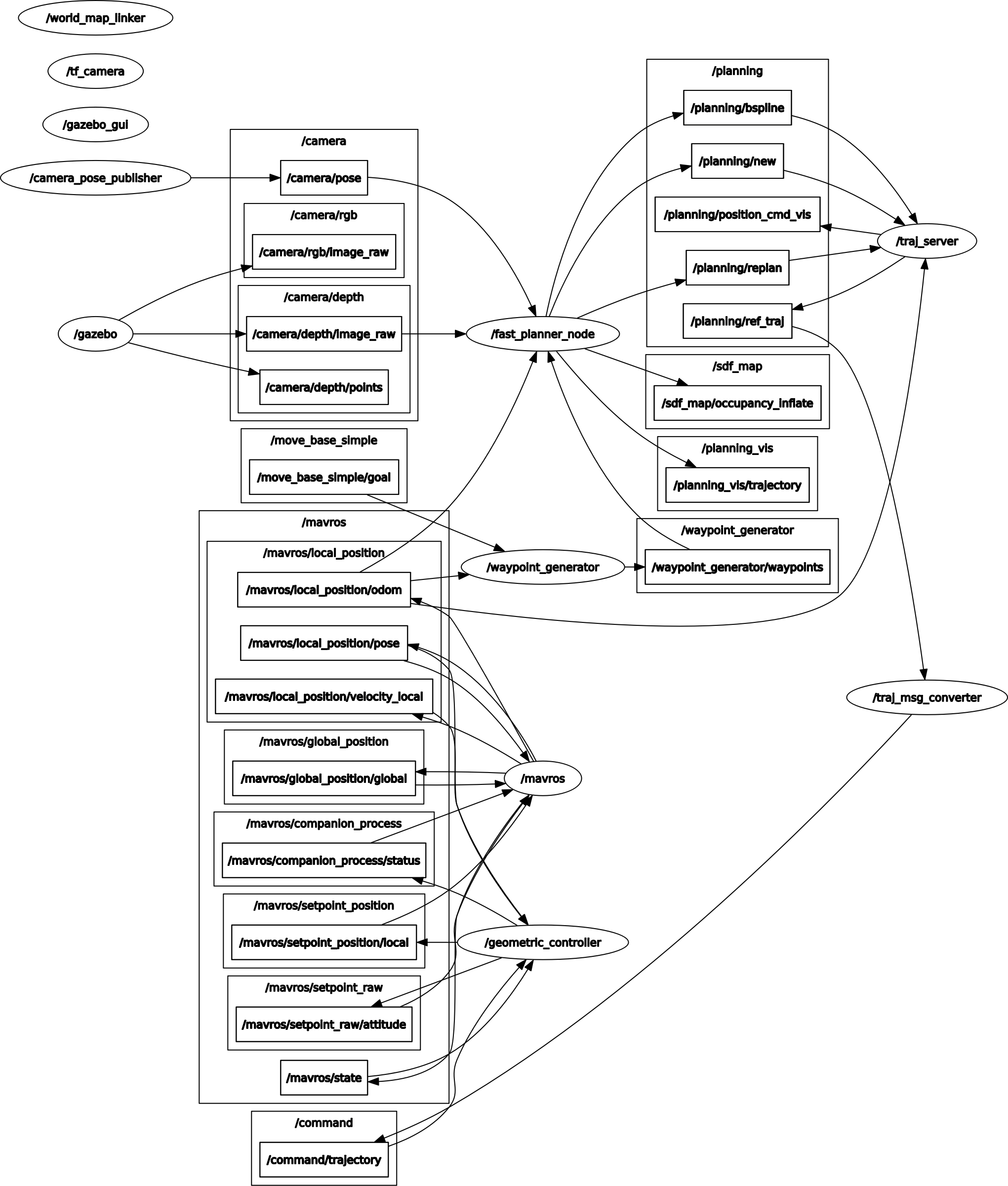
发布于 2021-06-29 无人机自主导航14 自主导航】硬件篇-VIO及Fast-Planner的无人机自主导航规划飞行 GanAHE 749 热度 无~ C/C++ 更多内容手打中… 一、硬件测试 二、实机飞行 三、节点图
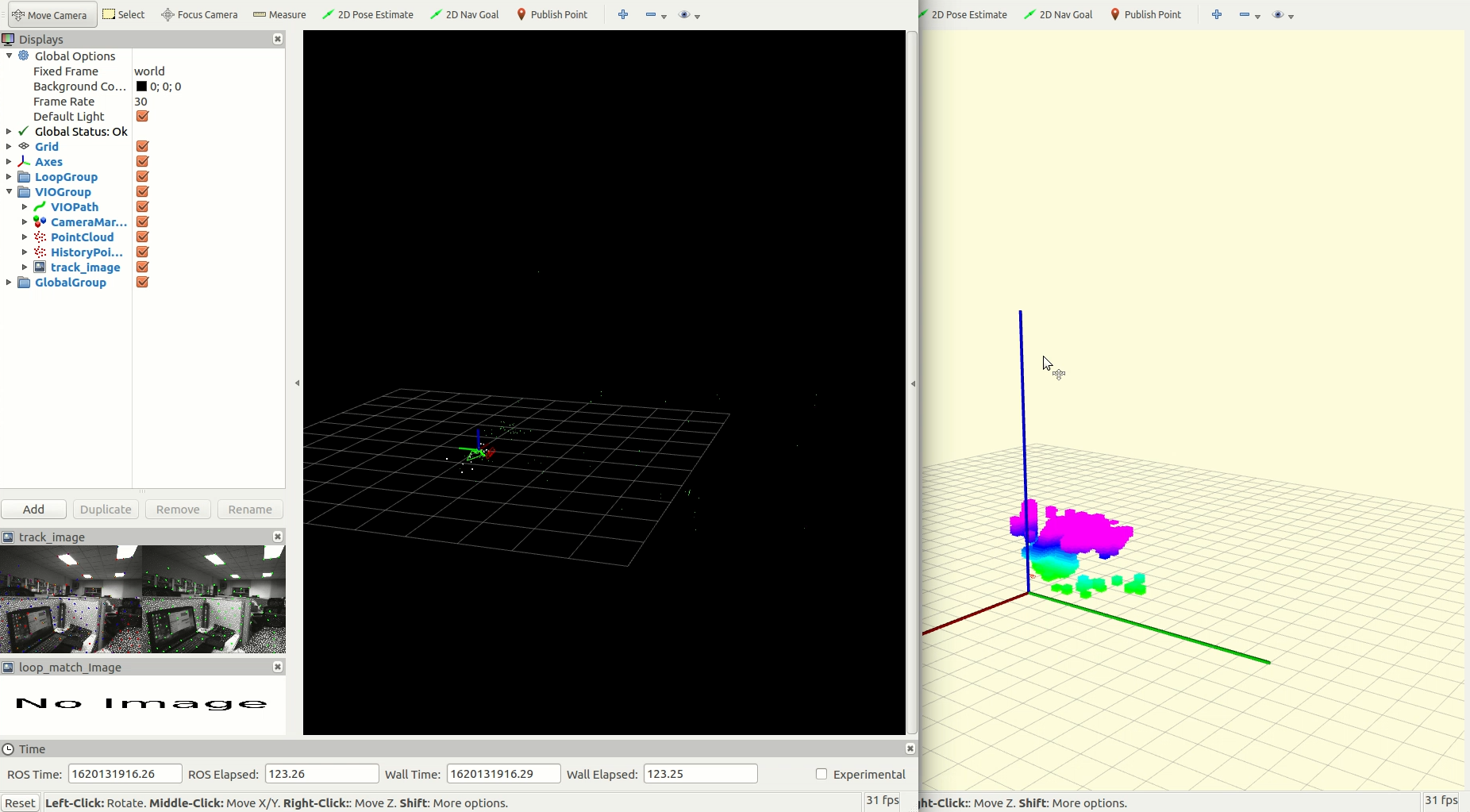
发布于 2021-05-04 无人机自主导航13 自主导航】硬件篇-飞行平台参数设定与飞行调试 GanAHE 830 热度 无~ Linux 一、VINS-Fusion与Fast-Planner结合运行 起飞前,将TianqueROS代码部署到实机平台,进行静态的测试。 …
发布于 2021-05-04 无人机自主导航12 自主导航】硬件篇-飞控、机载计算机与地面控制站通讯与控制 GanAHE 841 热度 无~ C/C++ 前提需求:安装ROS、MAVROS、配置飞控等。 一、PX4与机载计算机通讯-连接px4和机载计算机 官方教程:点击 1.1 硬件 …
发布于 2021-05-04 大疆Manifold-2C的Ubuntu16.04系统下编译Fast-Planner报错No rule to make target ‘/usr/lib/x86_64-linux-gnu/libproj.so’ GanAHE 502 热度 无~ Linux make[2]: *** No rule to make target '/usr/lib/x86_64-linux-g …
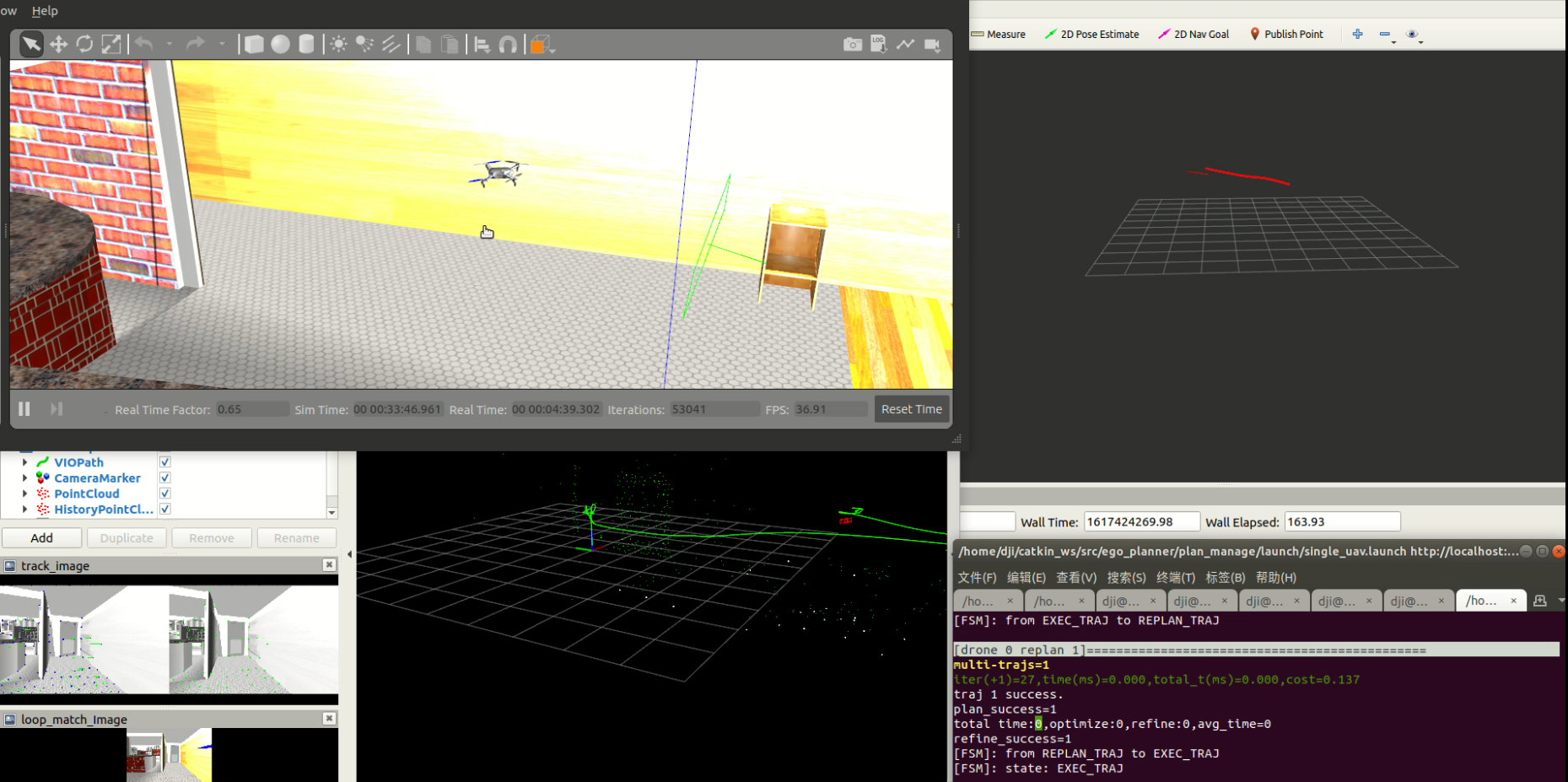
发布于 2021-04-05 【无人机自主导航10 自主导航】PX4仿真环境下RGBD+港科大Fast-Planner旋翼无人机自主导航 GanAHE 5249 热度 27 条评论 C/C++ 以开源项目XTDrone、Promethus、px4_fast_planner等为例,自行迁移修整的基于RGBD深度相机与港科大的 …
发布于 2021-04-03 【无人机自主导航9 自主导航】PX4仿真环境下的浙大VINS-Fusion+ego-Planner旋翼无人机自主导航 GanAHE 3262 热度 无~ ROS 前言 配置Ceres Start by installing all the dependencies. # CMake sudo …
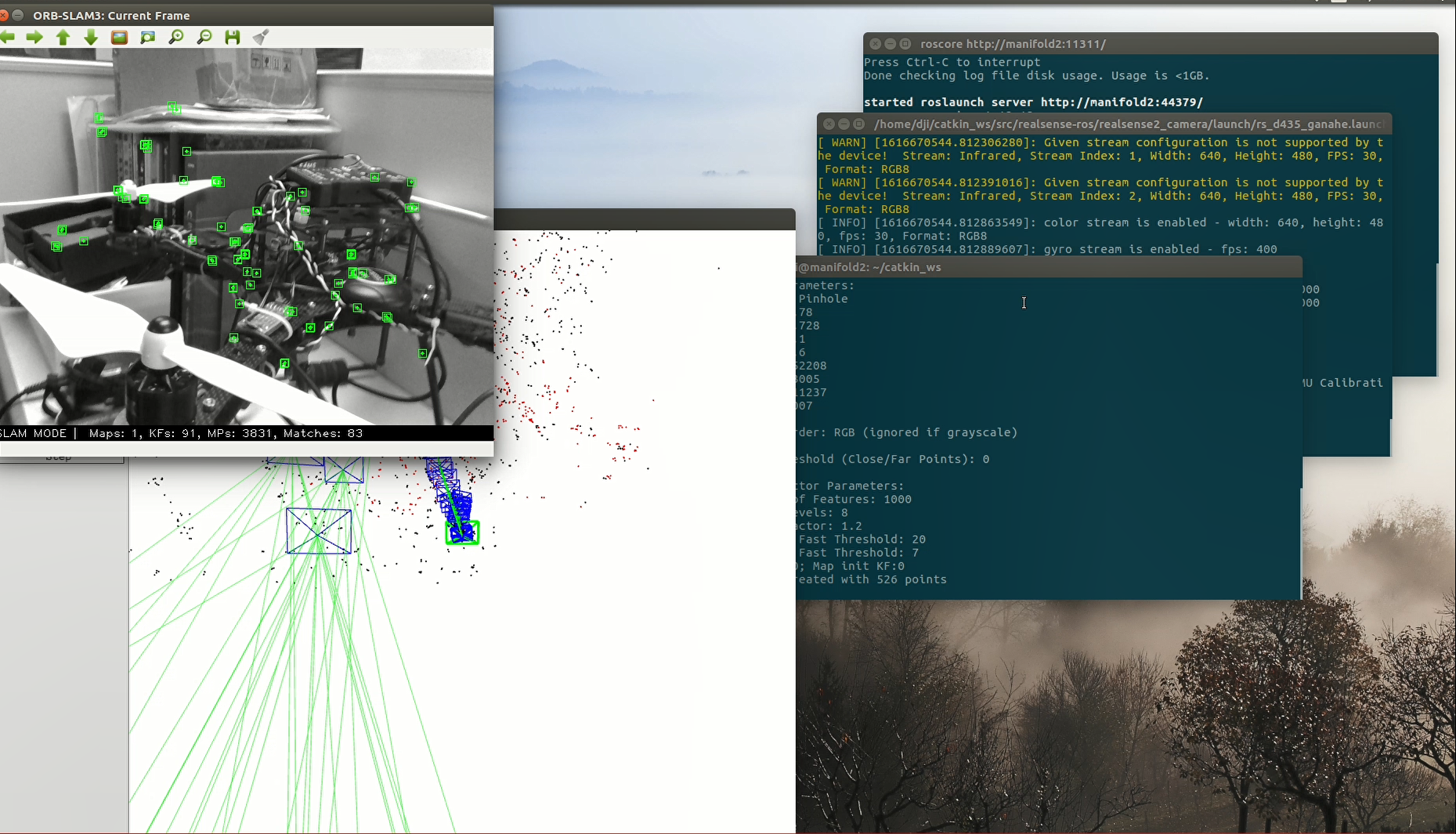
发布于 2021-04-02 【无人机自主导航7 SLAM】大疆Manifold2C平台及Intel Realsense D435i RGB-D相机实现ORB-SLAM3 GanAHE 939 热度 无~ ROS D435i相机在前一章节内容已有提及。 一、环境配置与相机参数修正 相关内容参见之前的文章,本文测试的相机配置如下: 二、参看相机 …
发布于 2021-03-28 Gazebo仿真环境加载模型错误,卡在启动页面:Spawn service failed. Exiting 解决办法 GanAHE 1146 热度 无~ ROS 在实现激光传感器的PX4自动导航避障时,执行roslaunch启动launch文件后,rviz启动正常,但Gazebo启动后卡住, …