前言
配置Ceres
Start by installing all the dependencies.
# CMake
sudo apt-get install cmake
# google-glog + gflags
sudo apt-get install libgoogle-glog-dev libgflags-dev
# BLAS & LAPACK
sudo apt-get install libatlas-base-dev
# Eigen3
sudo apt-get install libeigen3-dev
# SuiteSparse and CXSparse (optional)
sudo apt-get install libsuitesparse-devWe are now ready to build, test, and install Ceres.
到官网下载:http://ceres-solver.org/installation.html
或是git clone https://ceres-solver.googlesource.com/ceres-solver
tar zxf ceres-solver-2.0.0.tar.gz
sudo mkdir ceres-bin && cd ceres-bin
sudo cmake ../ceres-solver-2.0.0
sudo make -j3
sudo make test
#可以选择安装Ceres,也可以使用CMake导出,
#CMake允许在不需要安装的情况下使用Ceres,更多信息请参阅文档#中的EXPORT BUILD DIR选项。
sudo make installbin/simple_bundle_adjuster ../ceres-solver-2.0.0/data/problem-16-22106-pre.txt使用DENSE_SCHUR线性求解器,此Ceres最多可运行10次迭代。 输出应如下所示:
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 4.185660e+06 0.00e+00 1.09e+08 0.00e+00 0.00e+00 1.00e+04 0 7.59e-02 3.37e-01
1 1.062590e+05 4.08e+06 8.99e+06 5.36e+02 9.82e-01 3.00e+04 1 1.65e-01 5.03e-01
2 4.992817e+04 5.63e+04 8.32e+06 3.19e+02 6.52e-01 3.09e+04 1 1.45e-01 6.48e-01
3 1.899774e+04 3.09e+04 1.60e+06 1.24e+02 9.77e-01 9.26e+04 1 1.43e-01 7.92e-01
4 1.808729e+04 9.10e+02 3.97e+05 6.39e+01 9.51e-01 2.78e+05 1 1.45e-01 9.36e-01
5 1.803399e+04 5.33e+01 1.48e+04 1.23e+01 9.99e-01 8.33e+05 1 1.45e-01 1.08e+00
6 1.803390e+04 9.02e-02 6.35e+01 8.00e-01 1.00e+00 2.50e+06 1 1.50e-01 1.23e+00
Ceres Solver v2.0.0 Solve Report
----------------------------------
Original Reduced
Parameter blocks 22122 22122
Parameters 66462 66462
Residual blocks 83718 83718
Residual 167436 167436
Minimizer TRUST_REGION
Dense linear algebra library EIGEN
Trust region strategy LEVENBERG_MARQUARDT
Given Used
Linear solver DENSE_SCHUR DENSE_SCHUR
Threads 1 1
Linear solver threads 1 1
Linear solver ordering AUTOMATIC 22106, 16
Cost:
Initial 4.185660e+06
Final 1.803390e+04
Change 4.167626e+06
Minimizer iterations 6
Successful steps 6
Unsuccessful steps 0
Time (in seconds):
Preprocessor 0.261
Residual evaluation 0.082
Jacobian evaluation 0.412
Linear solver 0.442
Minimizer 1.051
Postprocessor 0.002
Total 1.357
Termination: CONVERGENCE (Function tolerance reached. |cost_change|/cost: 1.769766e-09 <= 1.000000e-06)VINS-Fusion
简介
VINS-Fusion是基于优化的多传感器状态估计器,可为自主应用(无人机,汽车和AR / VR)实现准确的自定位。 VINS-Fusion是VINS-Mono的扩展,它支持多种视觉惯性传感器类型(单摄像机+ IMU,立体摄像机+ IMU,甚至仅立体摄像机)即VINS-Fusion可以进行单目 + IMU, 双目 + IMU 或只有双目的多传感器融合定位,另外也可以融进GPS信息
编译
cp -r ~/XTDrone/sensing/slam/vio/VINS-Fusion ~/catkin_ws/src/
mkdir ~/catkin_ws/scripts/
cp ~/XTDrone/sensing/slam/vio/xtdrone_run_vio.sh ~/catkin_ws/scripts/
cd ~/catkin_ws
catkin_make #或catkin build,取决于自己的编译工具quadrotor_msgs
cd ~
git clone https://github.com/HKUST-Aerial-Robotics/plan_utils.git
cp -r plan_utils/quadrotor_msgs catkin_ws/src/
cd catkin_ws
catkin_make
source devel/setup.bash报错:
-- Could NOT find quadrotor_msgs (missing: quadrotor_msgs_DIR)
-- Could not find the required component 'quadrotor_msgs'. The following CMake error indicates that you either need to install the package with the same name or change your environment so that it can be found.
CMake Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by "quadrotor_msgs"
with any of the following names:
quadrotor_msgsConfig.cmake
quadrotor_msgs-config.cmake
ego-Planner安装
cp -r ~/XTDrone/motion_planning/3d/ego_planner ~/catkin_ws/src/
cd ~/catkin_ws/
catkin_make #或catkin build无人机自主导航
ego_planner需要输入深度图+相机位姿或是点云,这里以深度图+相机位姿的组合为例进行仿真,深度图来源于realsense_camera,相机位姿由VINS-Fusion计算得到。
首先按照VINS-Fusion仿真教程启动仿真,将飞机用键盘控制起飞后悬停,关闭键盘控制。
转换相机位姿的坐标系方向
cd ~/XTDrone/motion_planning/3d
python ego_transfer.py iris 0启动rviz
cd ~/XTDrone/motion_planning/3d
rviz -d ego_rviz.rviz启动ego_planner
roslaunch ego_planner single_uav.launch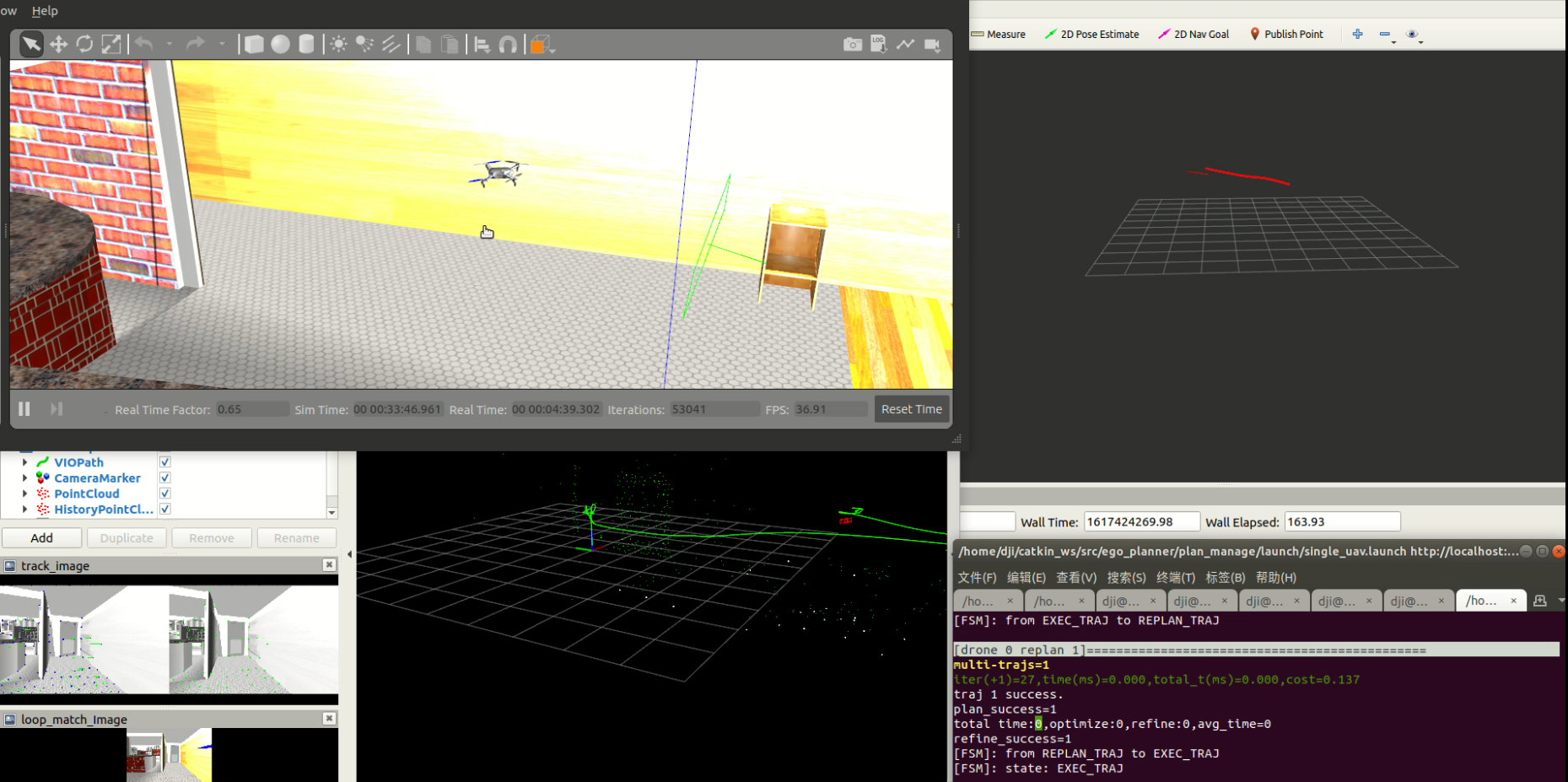
视频效果:
Comments NOTHING