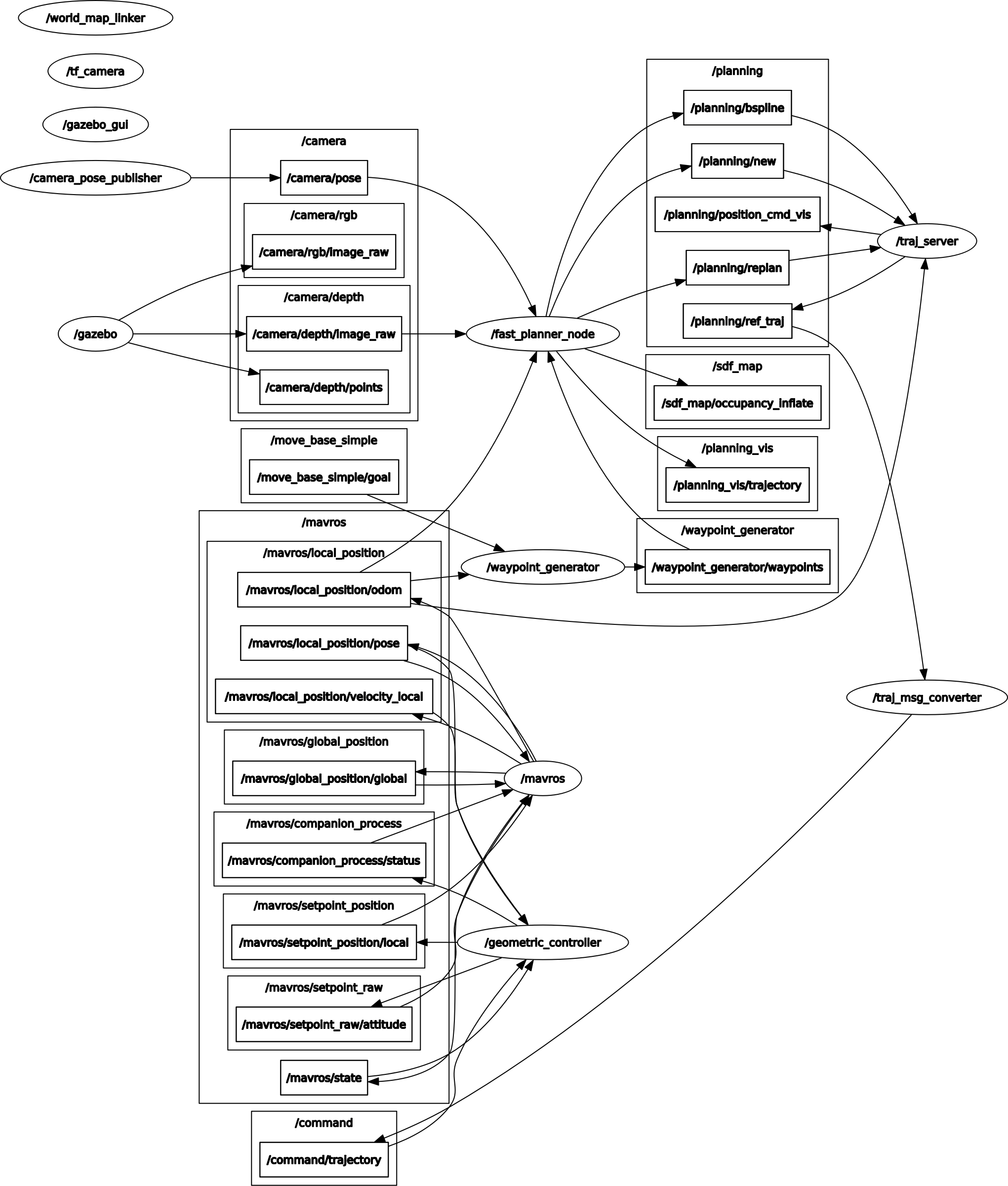
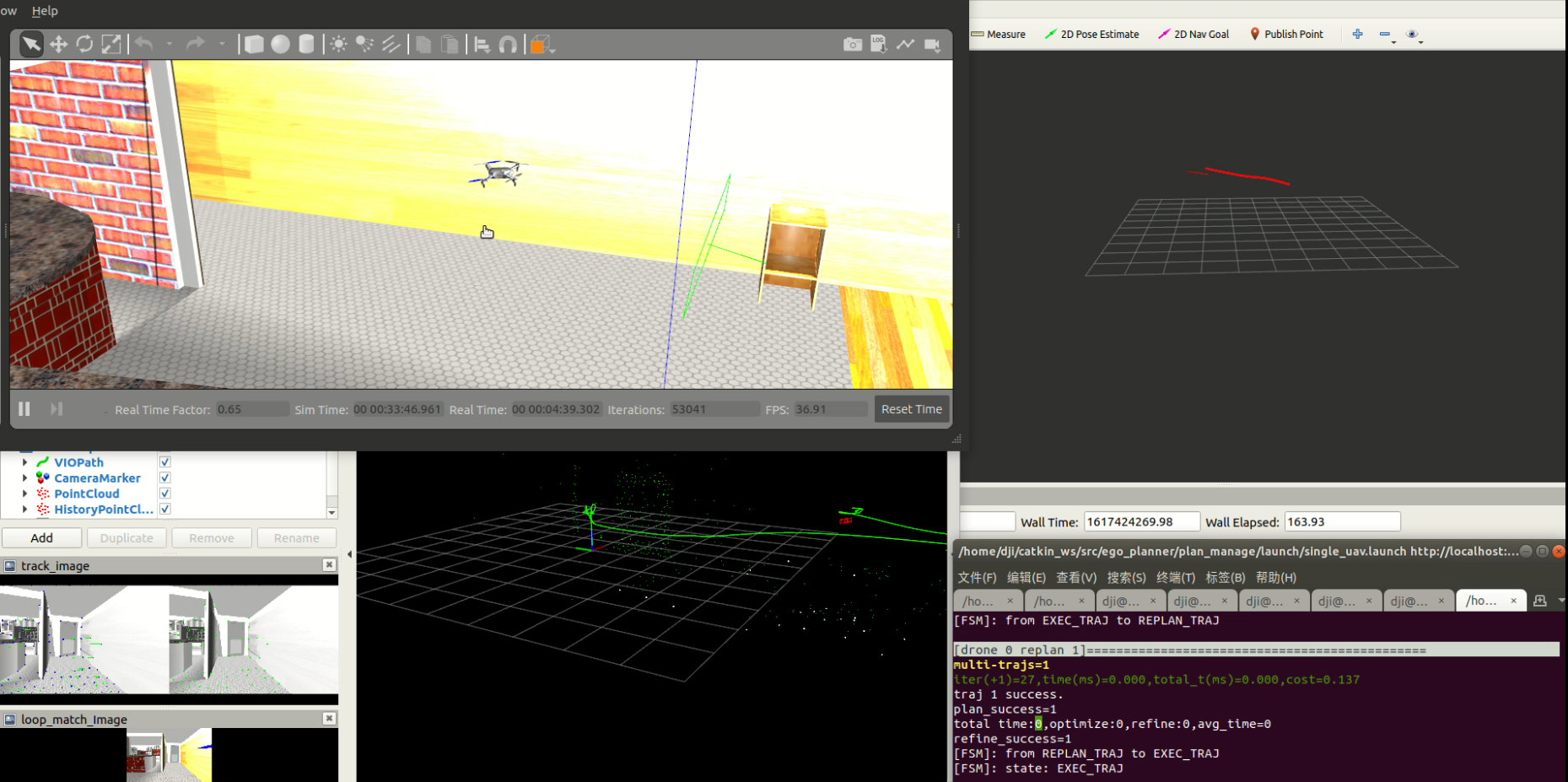
发布于 2021-04-05 【无人机自主导航10 自主导航】PX4仿真环境下RGBD+港科大Fast-Planner旋翼无人机自主导航 GanAHE 5249 热度 27 条评论 C/C++ 以开源项目XTDrone、Promethus、px4_fast_planner等为例,自行迁移修整的基于RGBD深度相机与港科大的 …
发布于 2021-04-03 【无人机自主导航9 自主导航】PX4仿真环境下的浙大VINS-Fusion+ego-Planner旋翼无人机自主导航 GanAHE 3262 热度 无~ ROS 前言 配置Ceres Start by installing all the dependencies. # CMake sudo …
发布于 2021-04-02 运行ORB-SLAM3算法录制Rosbag时报错导致ORB-SLAM3中断解决办法 GanAHE 335 热度 无~ ROS 在运行ORB-SLAM3时通过rosbag录制数据,但直接导致ORB-SLAM3停止,数据录制也失败: [ERROR] [1616 …
发布于 2021-03-28 Gazebo仿真环境加载模型错误,卡在启动页面:Spawn service failed. Exiting 解决办法 GanAHE 1146 热度 无~ ROS 在实现激光传感器的PX4自动导航避障时,执行roslaunch启动launch文件后,rviz启动正常,但Gazebo启动后卡住, …
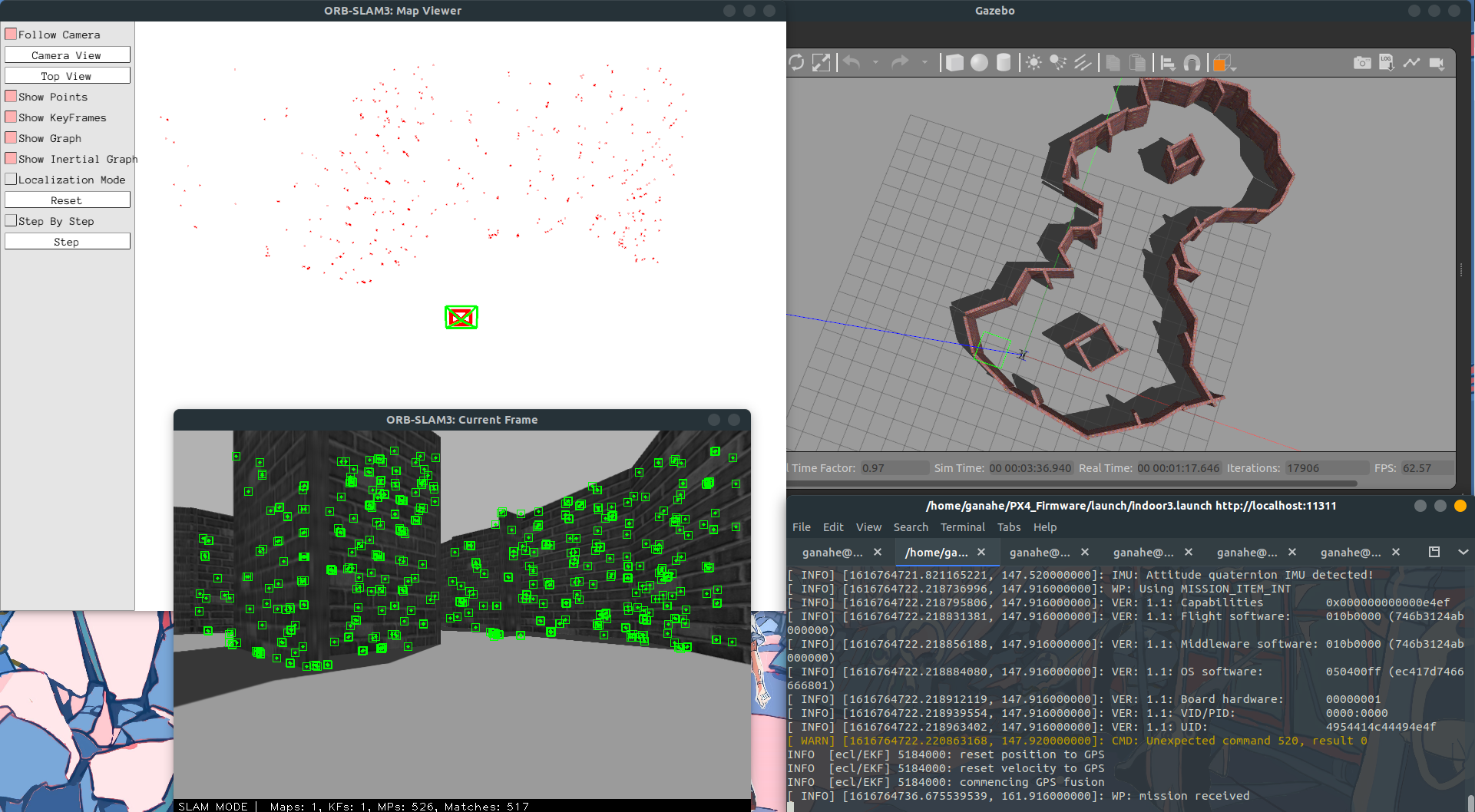
发布于 2021-03-26 【无人机自主导航6 SLAM】虚拟仿真环境Gazebo实现ORB-SLAM3及rosbag记录复现 GanAHE 718 热度 无~ Linux 一、依赖配置 在本站文章【无人机自主导航3-ORB-SLAM2】Gazebo仿真环境下的视觉SLAM已说明配置信息,基本相同,不再 …
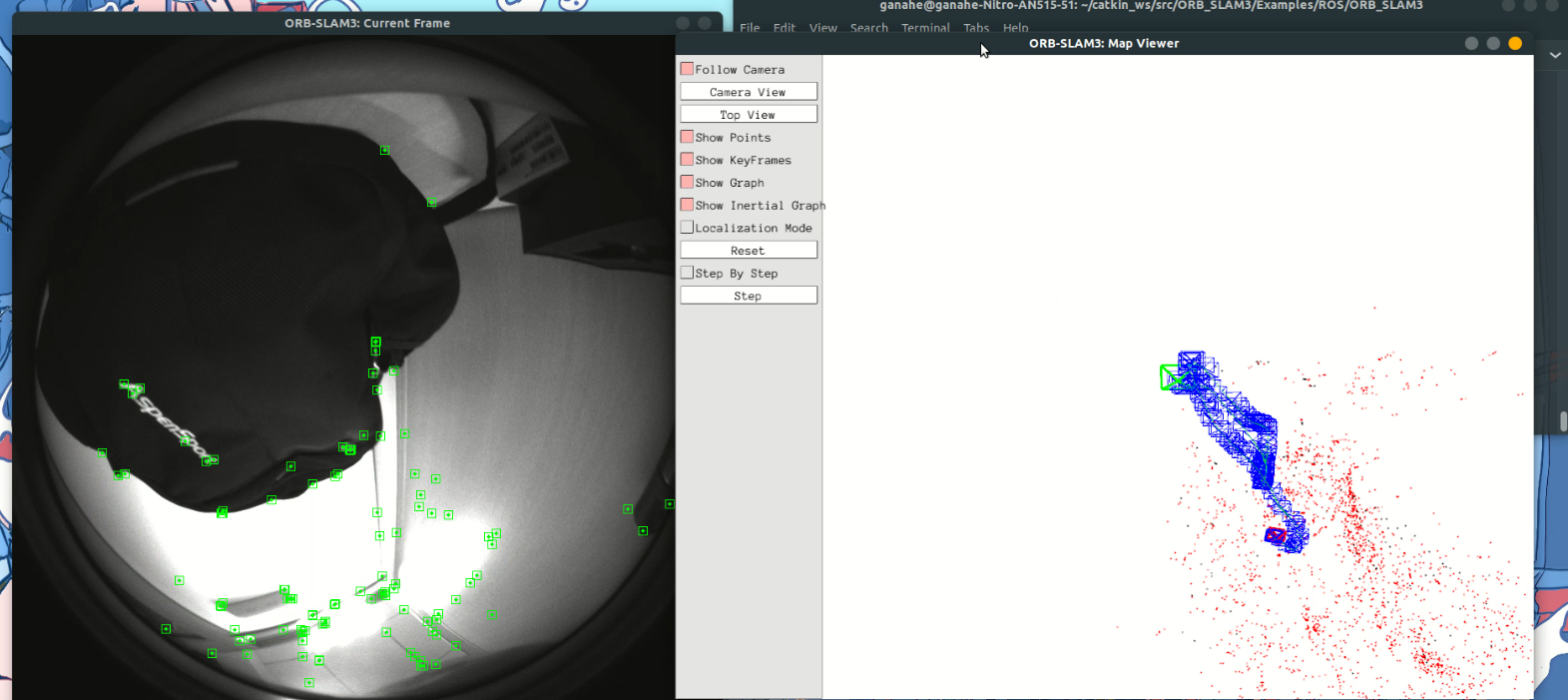
发布于 2021-03-21 【无人机自主导航5 SLAM】Intel Realsense T265C双目相机实现ORB-SLAM3 GanAHE 1488 热度 5 条评论 C/C++ 深度相机的SDK驱动安装、ROS功能包编译等内容在本站文章: 【无人机自主导航4-1 视觉传感器】通过ROS发布、订阅话题连接视觉 …
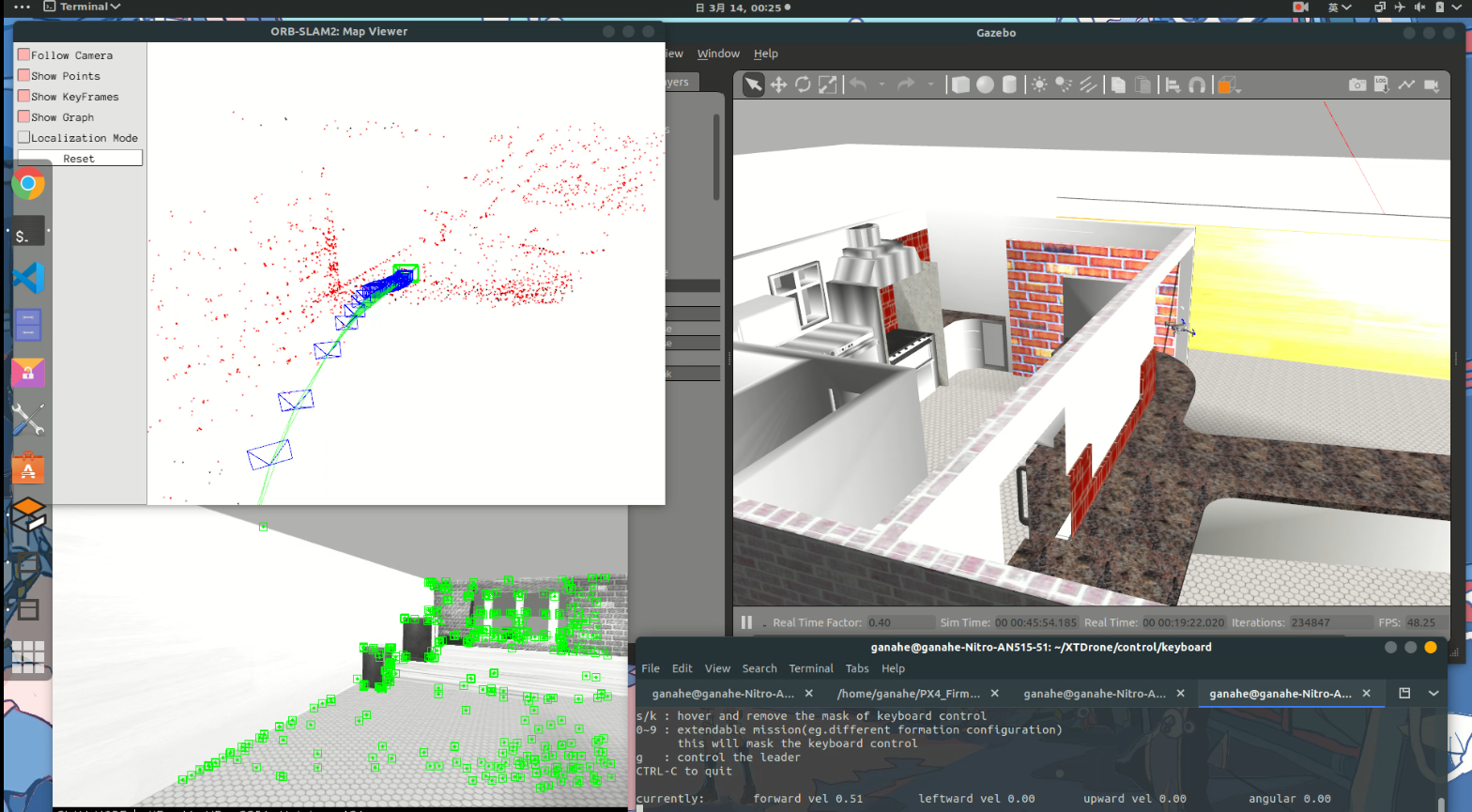
发布于 2021-03-14 【无人机自主导航3-ORB-SLAM2】Gazebo仿真环境下的视觉SLAM GanAHE 1326 热度 2 条评论 C/C++ 一、背景 无人机的自主导航需要无人机的位置信息、姿态等,在空旷的室外环境,一般需要基于GNSS系统进行位置信息的获取与无人机导航。 …