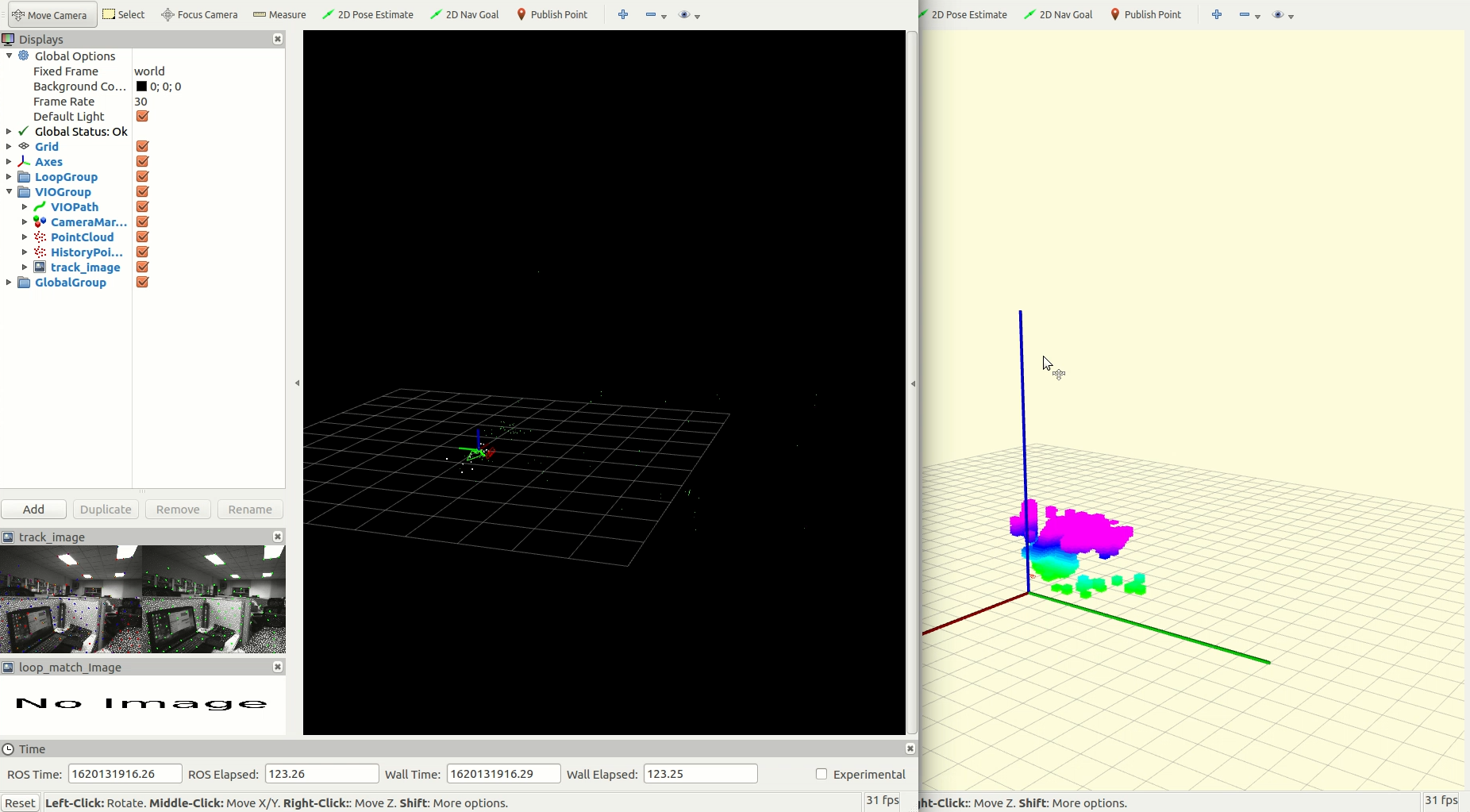
一、VINS-Fusion与Fast-Planner结合运行
起飞前,将TianqueROS代码部署到实机平台,进行静态的测试。
--
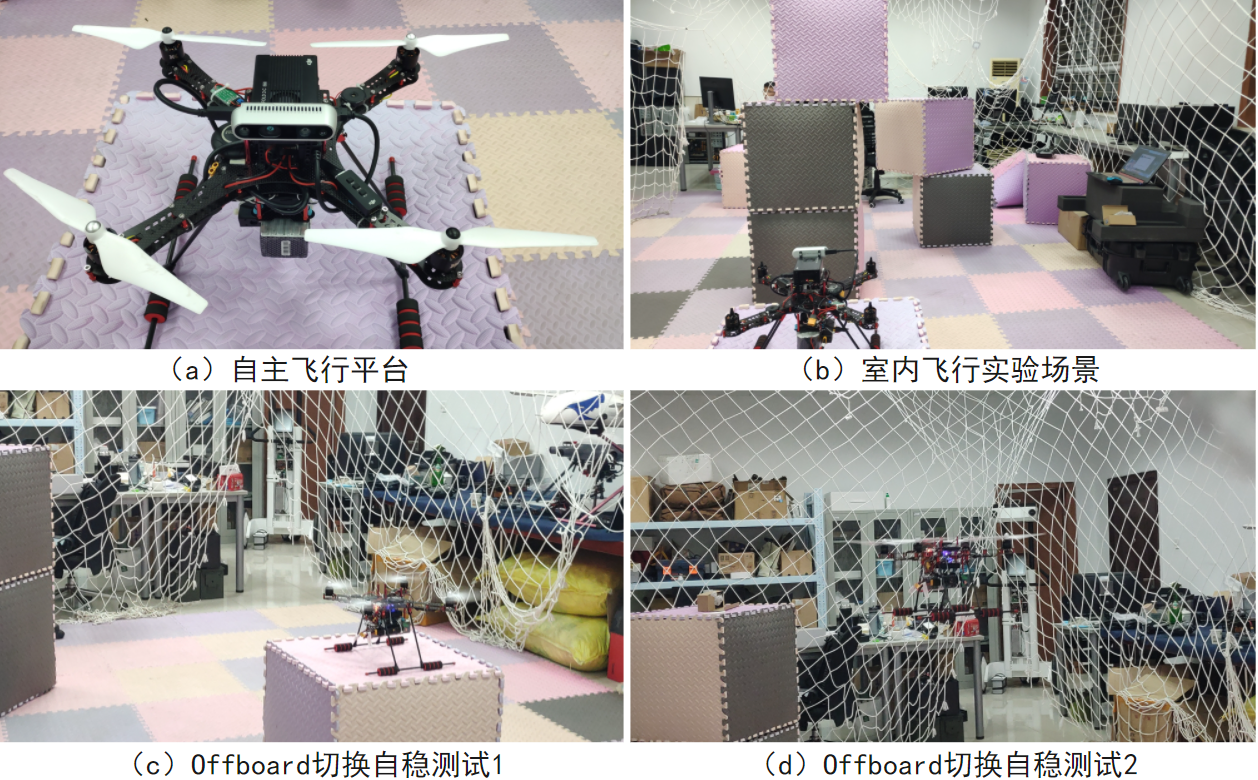
二、遥控飞行:Offboard模式切换稳定性、可控性测试
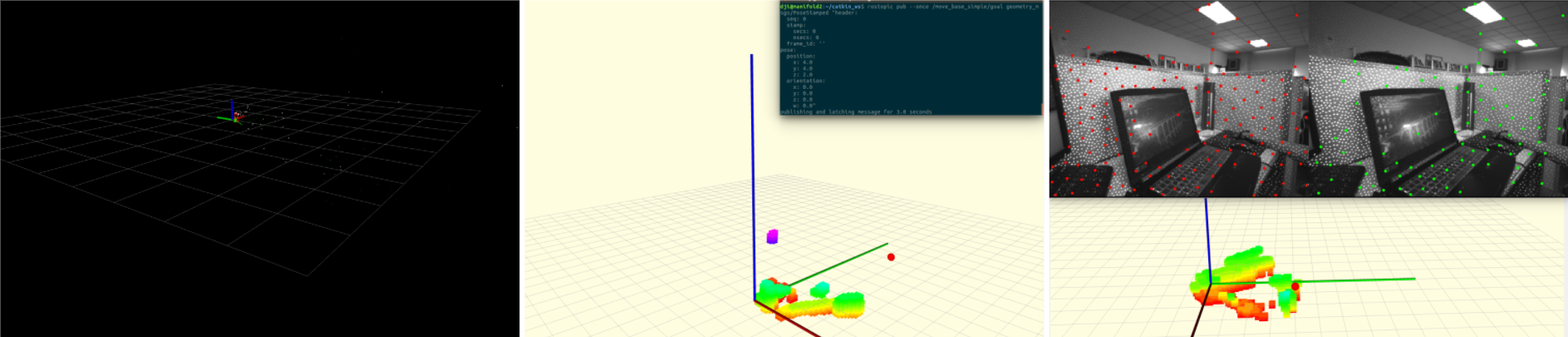
三、任务发布与主从机控制飞行
3.1 解锁与通讯参数
| 参数 | 默认参数 | 修改参数 | 用途 |
|---|---|---|---|
| CBRK_USB_CHK | 0 | 197848 | 去掉USB连接无法解锁参数,平台采用USB将机载计算机连接到Pixhawk |
| COM_ARM_WO_GPS | allow... | 旨在室内无GPS解锁 | |
| MAV_1_CONFIG | - | TELEM 2 | (MAV_1_CONFIG总是配置为 TELEM 2 端口) |
| MAV_1_MODE | - | Onboard | |
| SER_TEL2_BAUD | - | 921600 | (建议在像日志流或FastRTPS之类的应用,使用 921600 或更高) |
| safety | 0 | 22027 | |
| CHK |
3.2 Offboard参数
| 参数 | 描述 |
|---|---|
| COM_OF_LOSS_T | 丢失 Offboard 连接时的等待超时时间(以秒为单位),然后将触发 offboard 丢失的失效保护措施 (COM_OBL_ACT 和 COM_OBL_RC_ACT) |
| COM_OBL_ACT | 在没有 连接到遥控器的情况下,如果丢失 offboard 控制,则切换换到该模式(值为 - 0:降落,1:保持,2:返航)。 |
| COM_OBL_RC_ACT | 连接到遥控器的情况下,如果丢失 offboard 控制, 则切换到该模式 (取值为 - 0:位置,1:高度,2:手动,3:返航,4:降落)。 |
| COM_RC_OVERRIDE | 控制多旋翼(或者多旋翼模式下的 VOTL)的摇杆移动量来切换到 位置模式。 默认情况下未启用此功能。 |
| COM_RC_STICK_OV | 导致发射机切换到 位置模式 的摇杆移动量(如果COM_RC_OVERRIDE 已启用) |
3.3 视觉定位参数
外部位置估计的设置
| 参数 | 描述 |
|---|---|
| EKF2_AID_MASK | 设置 视觉位置合成 和 视觉偏航合成 |
| EKF2_HGT_MODE | 设置为 Vision 使用视觉作为高度估计的主要来源。 |
| EKF2_EV_DELAY | 设置为测量的时间戳和 "实际" 捕获时间之间的差异。 有关详细信息,请参阅 below |
| EKF2_EV_POS_X, EKF2_EV_POS_Y, EKF2_EV_POS_Z | 设置视觉传感器(或 MoCap 标记)相对于机器人的车身框架的位置 |
3.4 其他安全参数
| 参数 | 说明 |
|---|---|
| MPC_LAND_SPEED | 着陆过程中的下降速率。 鉴于地面情况未知,这个值应该设得相当小 |
| COM_DISARM_LAND | 着陆后自动解锁的等待时间,几秒内。如果设置为-1,车辆在着陆时不会解锁 |
| COM_RC_OVERRIDE | 如果启用操纵杆运动,则在位置模式下将控制权交还给操控员(除非车辆处理严重的电池故障保护),默认启用 |
其他
硬件调控代码功能包为experiment_fast_planner
Comments NOTHING