
C/C++
发布于 2022-10-24
TianqueROS常见错误与解决方案集锦【持续更新】
发布于 2022-03-20
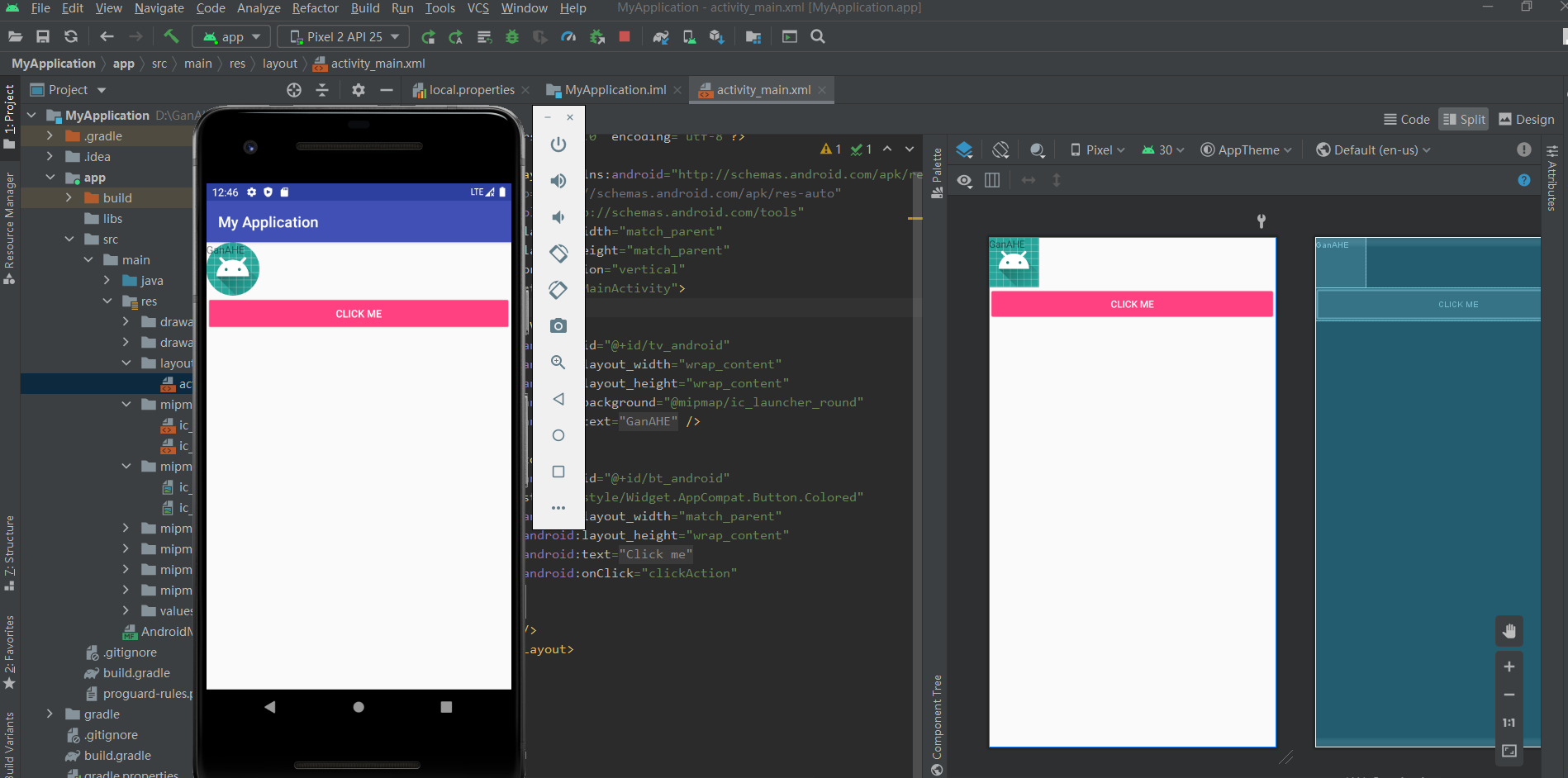
Android NDK(C++)在module中通过CMake配置生成so库
发布于 2022-03-12
51单片机Keil C51变量定义后仍然报错’x’ undefined identifier
发布于 2021-06-29
【无人机飞行控制软件开发】无人机地面站构成与配置开发

发布于 2021-06-29
TianqueROS项目框架
发布于 2021-06-29
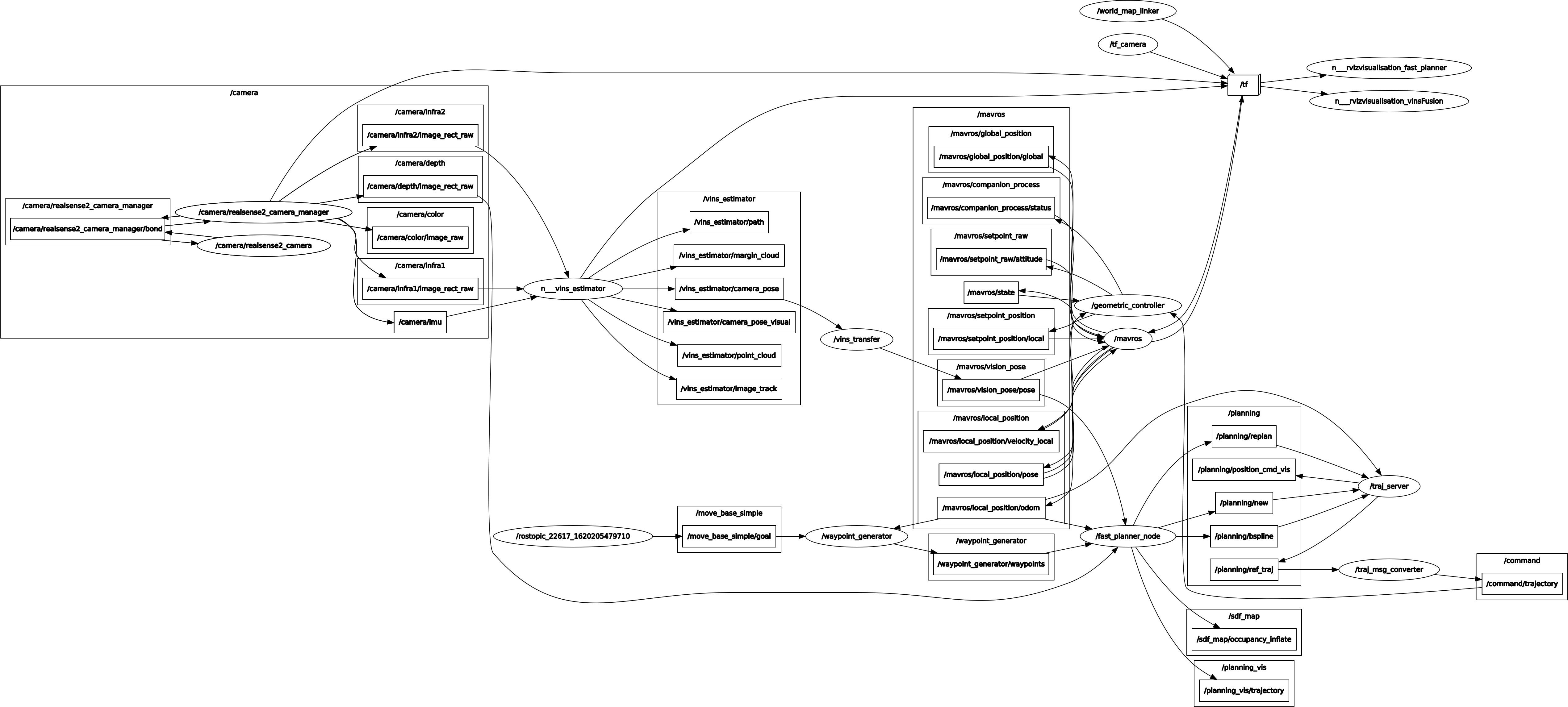
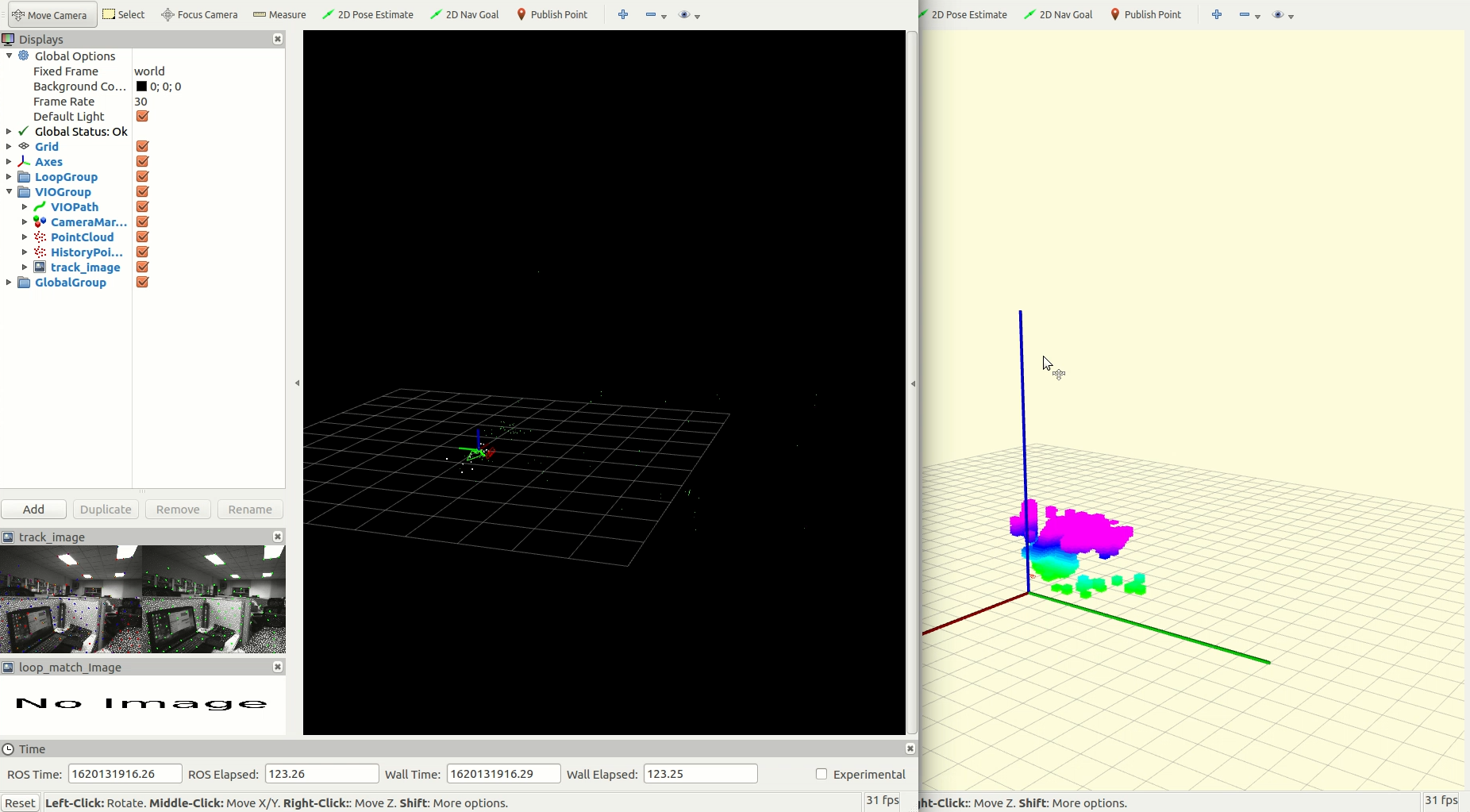
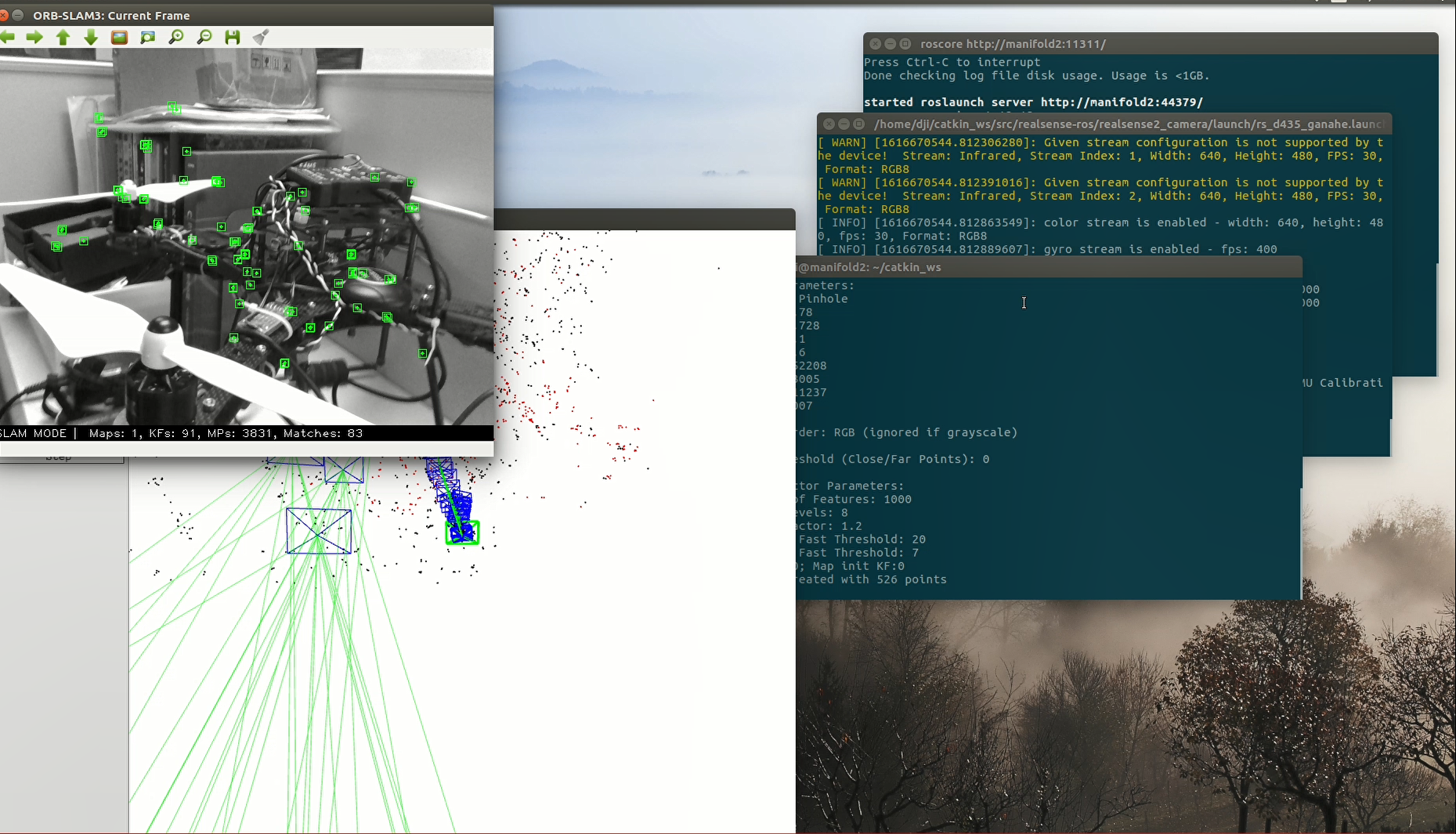
无人机自主导航15 自主导航】硬件篇-实机飞行基于VINS-Fusion的D435i视觉惯性里程计方案
发布于 2021-06-29
无人机自主导航14 自主导航】硬件篇-VIO及Fast-Planner的无人机自主导航规划飞行
发布于 2021-05-04
无人机自主导航13 自主导航】硬件篇-飞行平台参数设定与飞行调试

发布于 2021-03-28