发布于 2022-10-24 TianqueROS常见错误与解决方案集锦【持续更新】 GanAHE 817 热度 无~ C/C++ 目录 [TOC] 问题 1 apt-get update ROS包报错 W: An error occurred during t …
发布于 2021-06-29 从rosbag从提取某一个Topic视频 GanAHE 732 热度 无~ Linux 有时候我们通过rosbag录制到材料后,需要从中提取某一个视频topic出来,以供后续处理,此时就需要进行视频的提取,相关的执行脚 …
发布于 2021-06-29 TianqueROS项目框架 GanAHE 988 热度 无~ C/C++ 概述 TianqueROS为基于ROS开发的机器人操作解决方案,基于现有技术手段,结合硬件进行功能开发。 The complete …
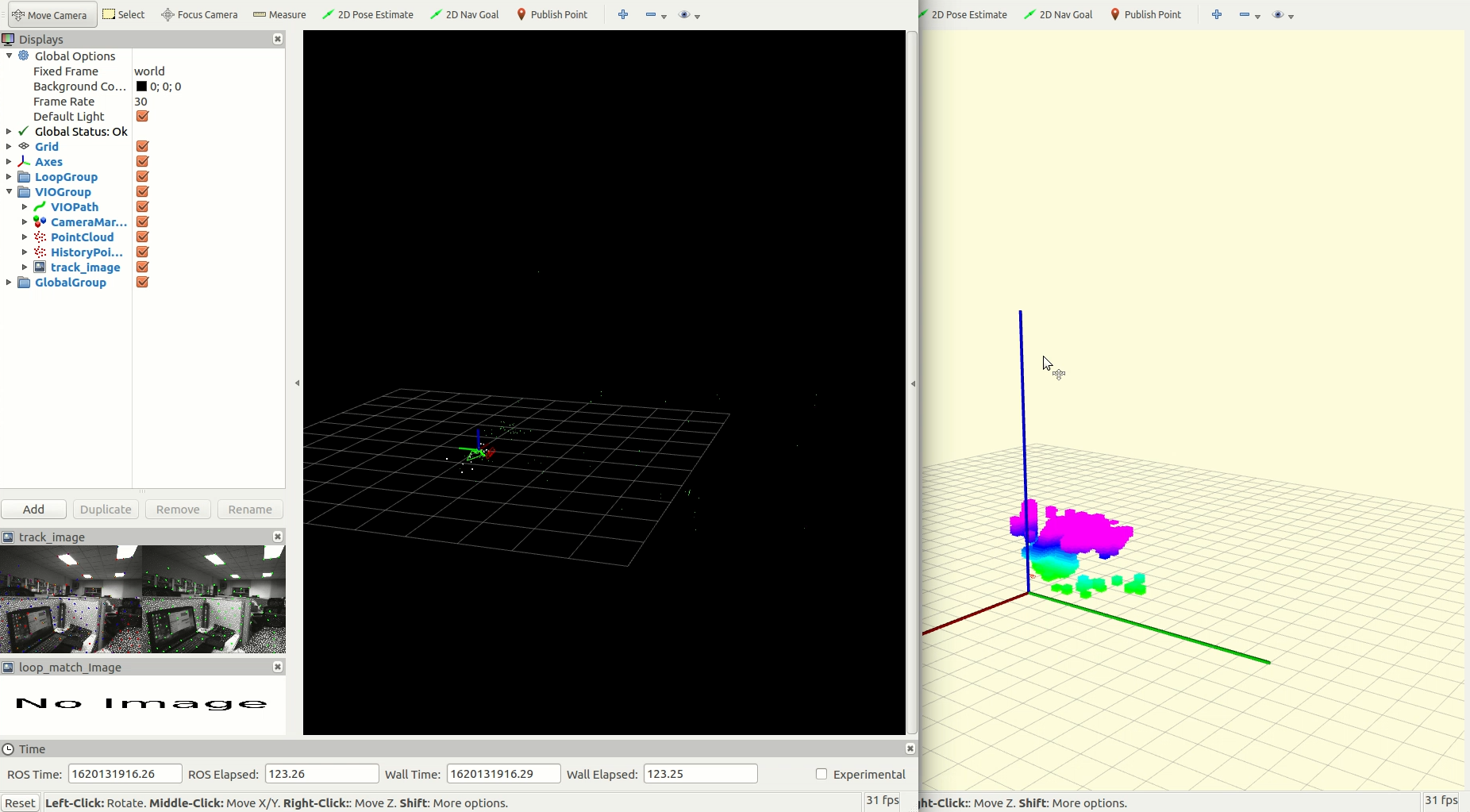
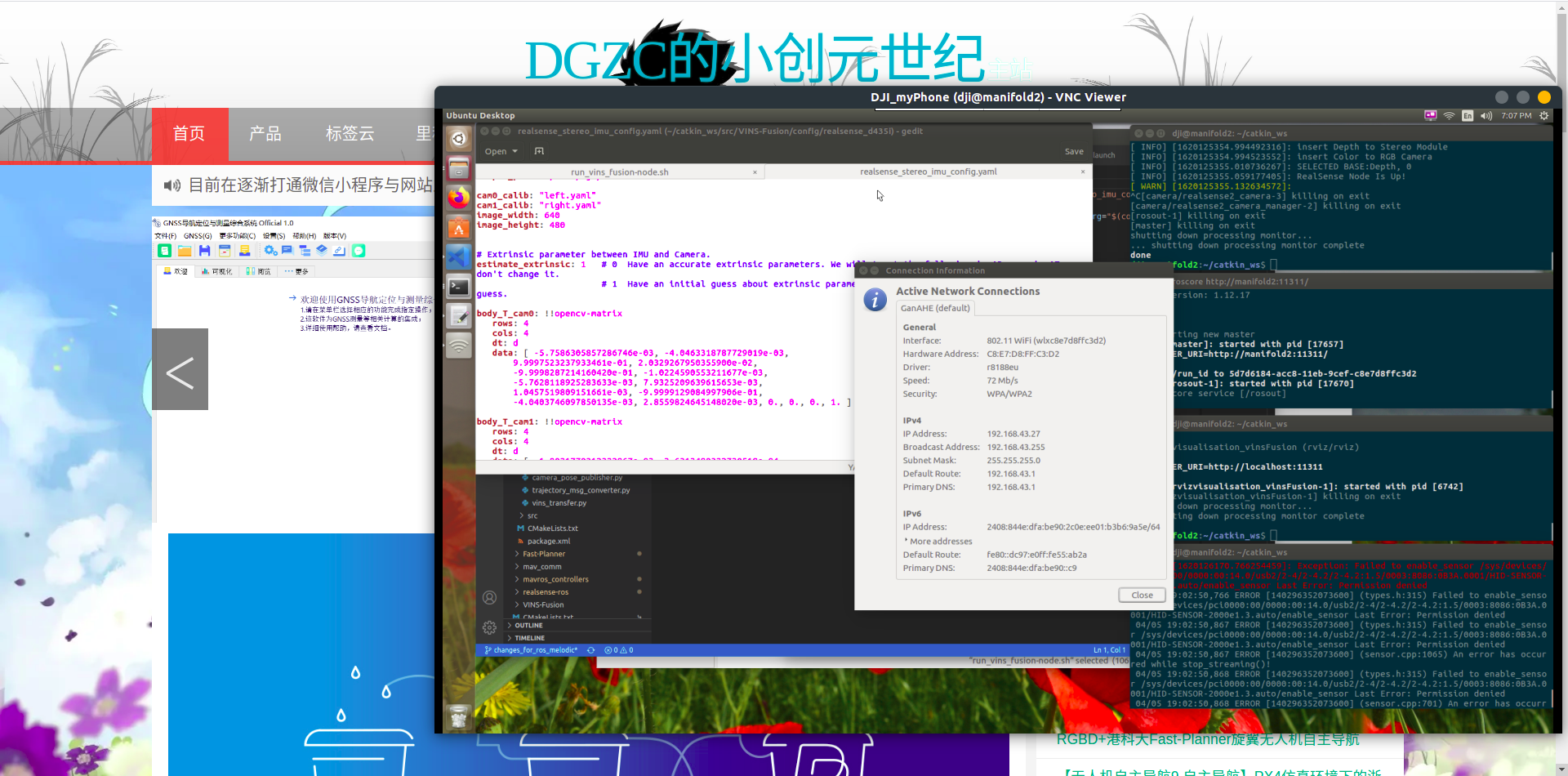
发布于 2021-06-29 无人机自主导航15 自主导航】硬件篇-实机飞行基于VINS-Fusion的D435i视觉惯性里程计方案 GanAHE 907 热度 无~ C/C++ Ceres VINS-Fusion 配置文件 测试跑通
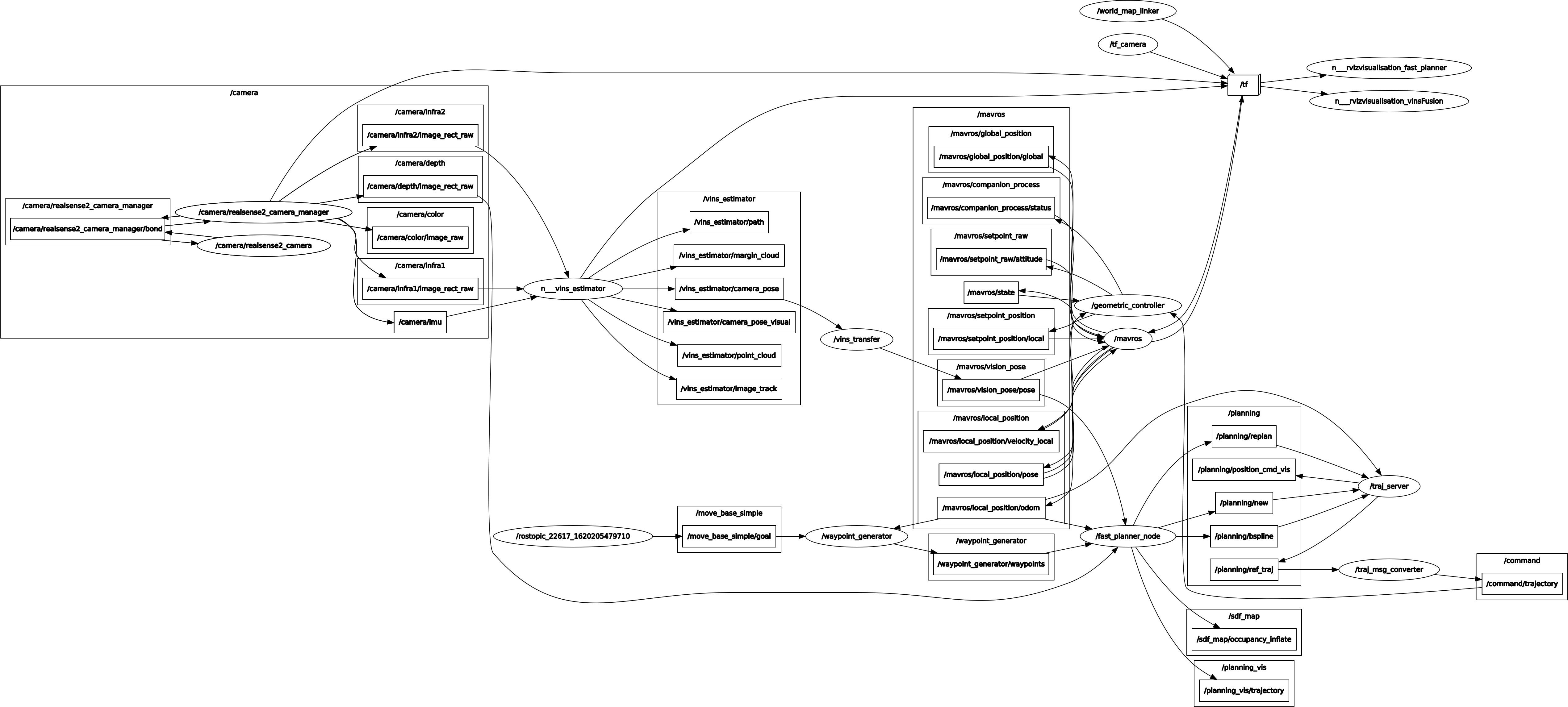
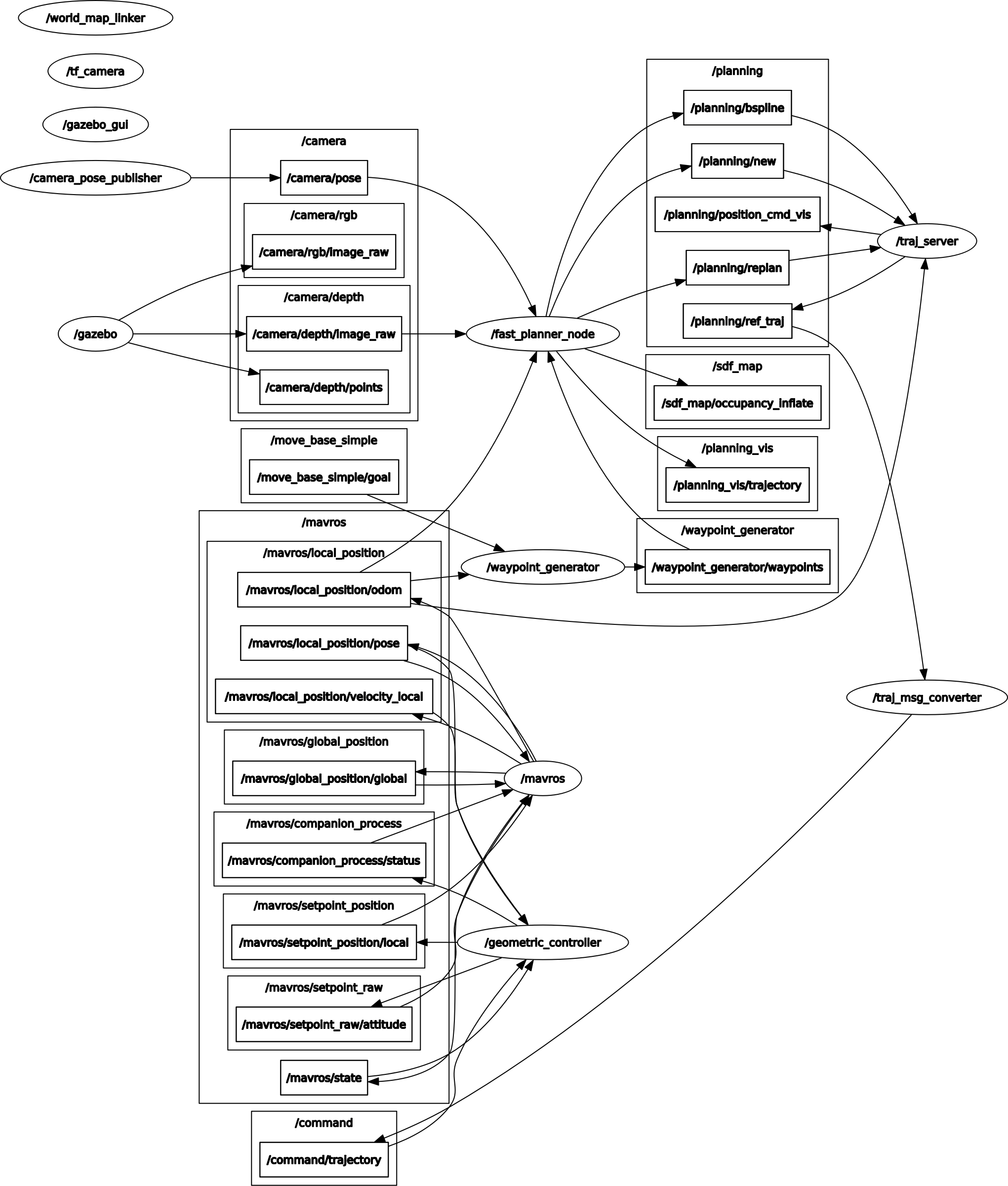
发布于 2021-06-29 无人机自主导航14 自主导航】硬件篇-VIO及Fast-Planner的无人机自主导航规划飞行 GanAHE 1033 热度 2 条评论 C/C++ 更多内容手打中… 一、硬件测试 二、实机飞行 三、节点图
发布于 2021-06-15 Ubuntu卡住死机后非强制停机安全启动方法 GanAHE 493 热度 无~ Linux 首先,无论Ubuntu出现什么状况,千万不要强制重启 安全重启 同时按住 Ctrl 和 Alt 键,后续都按住不要放 按一下 Sy …
发布于 2021-05-04 无人机自主导航13 自主导航】硬件篇-飞行平台参数设定与飞行调试 GanAHE 952 热度 无~ Linux 一、VINS-Fusion与Fast-Planner结合运行 起飞前,将TianqueROS代码部署到实机平台,进行静态的测试。 …
发布于 2021-05-04 无人机自主导航12 自主导航】硬件篇-飞控、机载计算机与地面控制站通讯与控制 GanAHE 1106 热度 无~ C/C++ 前提需求:安装ROS、MAVROS、配置飞控等。 一、PX4与机载计算机通讯-连接px4和机载计算机 官方教程:点击 1.1 硬件 …
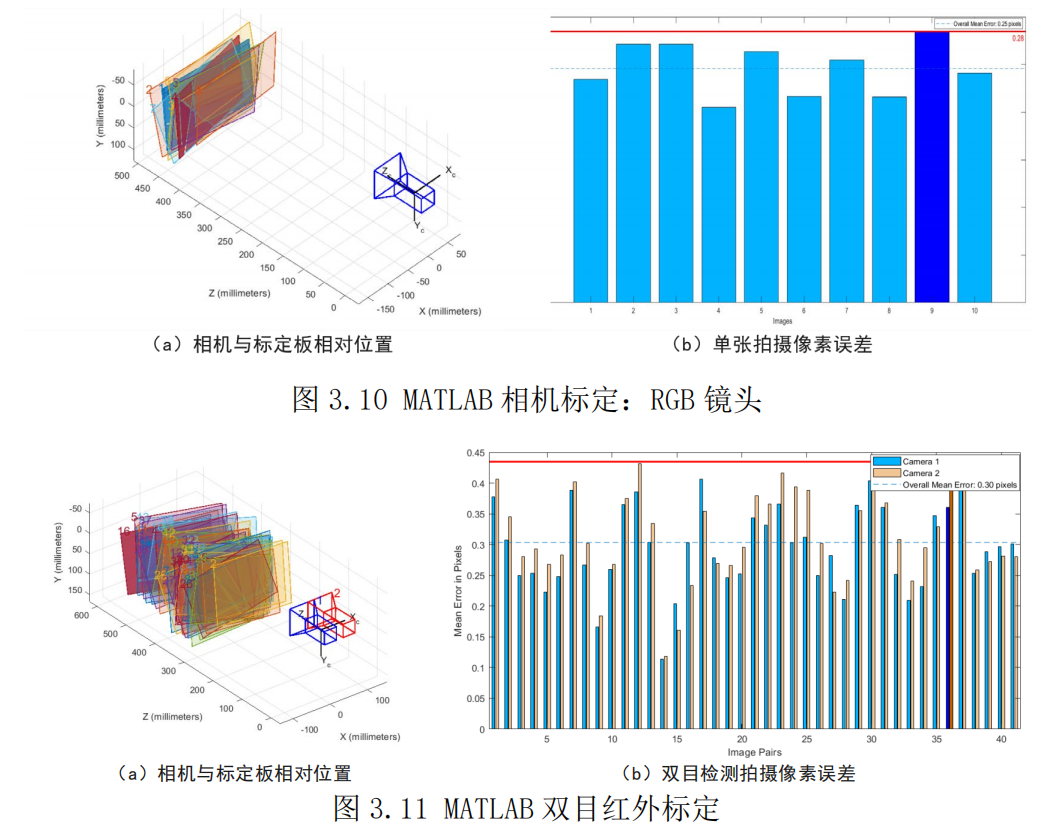
发布于 2021-05-04 【无人机自主导航11 自主导航】硬件篇-相机及IMU联合标定(MATLAB+Kalibr) GanAHE 860 热度 无~ Linux 在SLAM的众多传感器解决方案中,相机与IMU的融合被认为具有很大的潜力实现低成本且高精度的定位与建图。这是因为这两个传感器之间具 …
发布于 2021-05-04 大疆Manifold-2C的Ubuntu16.04系统下编译Fast-Planner报错No rule to make target ‘/usr/lib/x86_64-linux-gnu/libproj.so’ GanAHE 603 热度 无~ Linux make[2]: *** No rule to make target '/usr/lib/x86_64-linux-g …
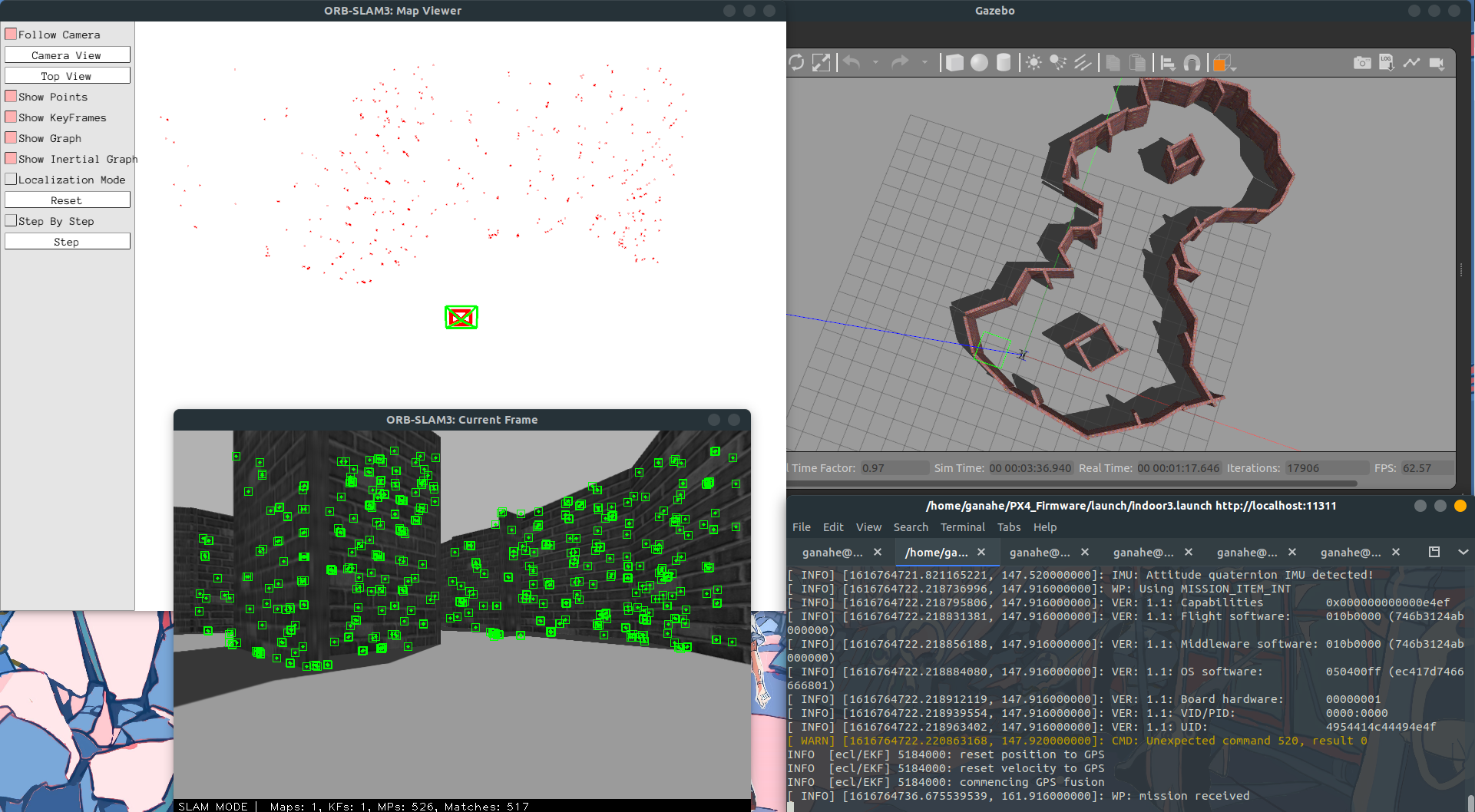
发布于 2021-04-05 【无人机自主导航10 自主导航】PX4仿真环境下RGBD+港科大Fast-Planner旋翼无人机自主导航 GanAHE 5716 热度 27 条评论 C/C++ 以开源项目XTDrone、Promethus、px4_fast_planner等为例,自行迁移修整的基于RGBD深度相机与港科大的 …
发布于 2021-03-26 【无人机自主导航6 SLAM】虚拟仿真环境Gazebo实现ORB-SLAM3及rosbag记录复现 GanAHE 847 热度 无~ Linux 一、依赖配置 在本站文章【无人机自主导航3-ORB-SLAM2】Gazebo仿真环境下的视觉SLAM已说明配置信息,基本相同,不再 …