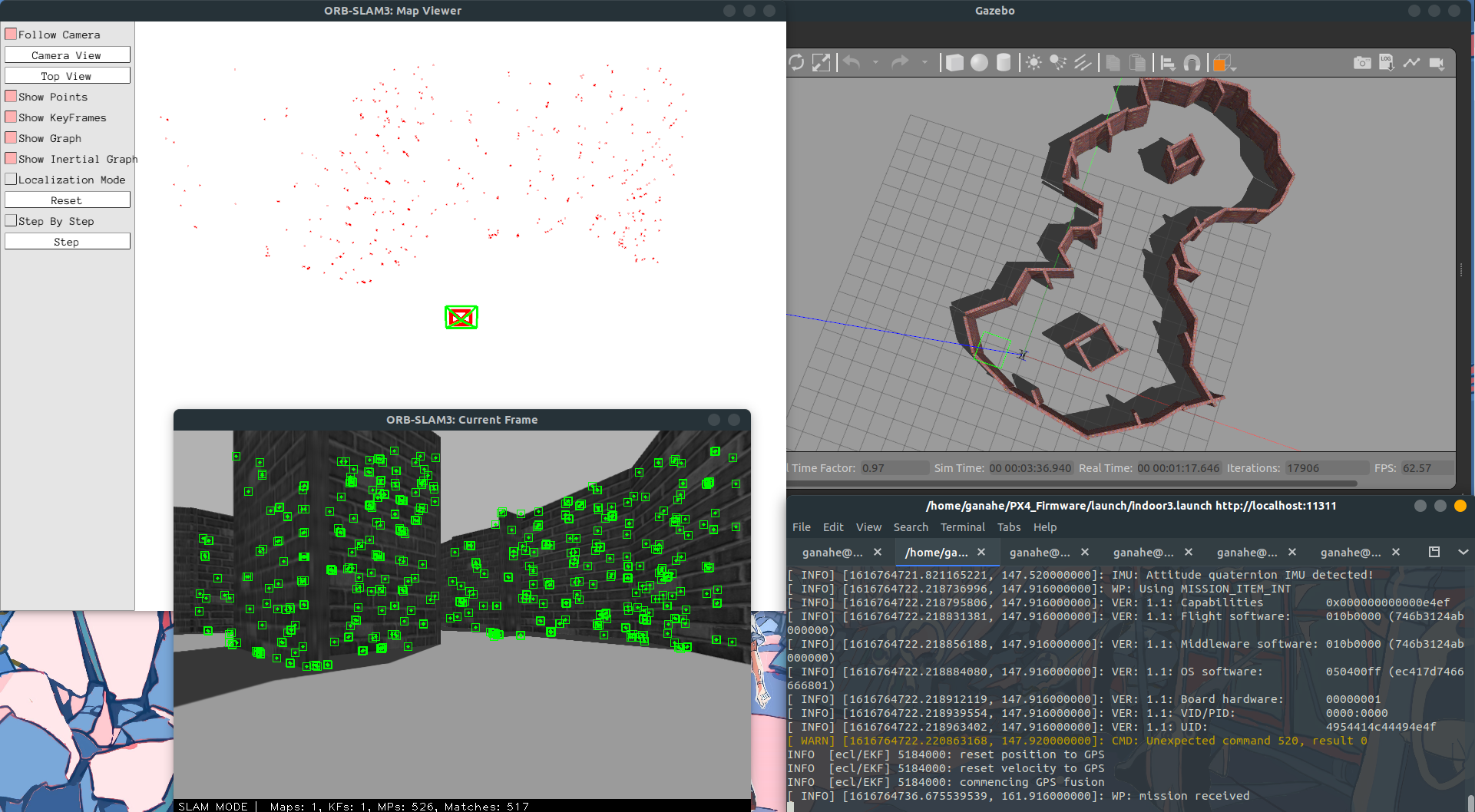
发布于 2021-03-26 【无人机自主导航6 SLAM】虚拟仿真环境Gazebo实现ORB-SLAM3及rosbag记录复现 GanAHE 717 热度 无~ Linux 一、依赖配置 在本站文章【无人机自主导航3-ORB-SLAM2】Gazebo仿真环境下的视觉SLAM已说明配置信息,基本相同,不再 …
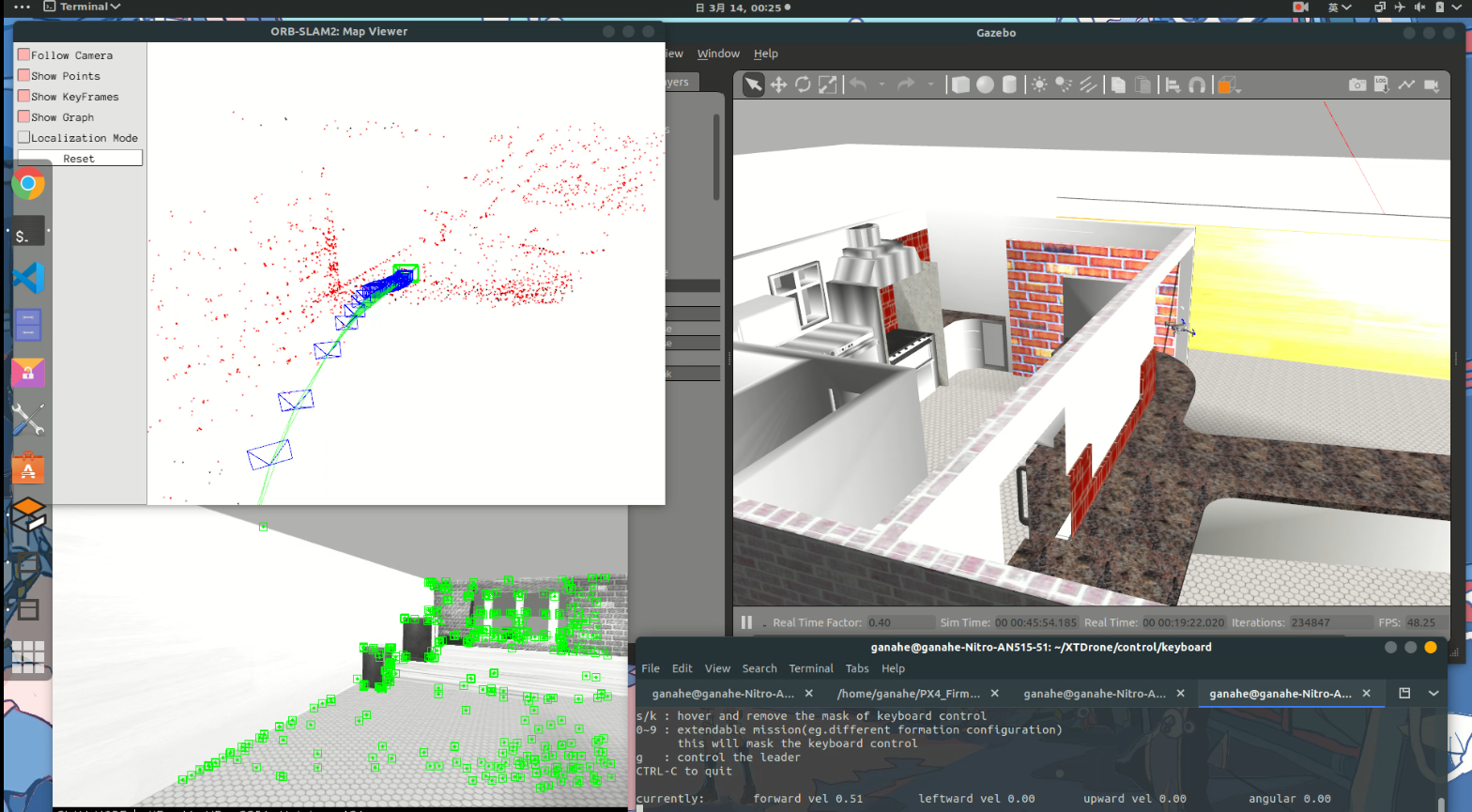
发布于 2021-03-14 【无人机自主导航3-ORB-SLAM2】Gazebo仿真环境下的视觉SLAM GanAHE 1325 热度 2 条评论 C/C++ 一、背景 无人机的自主导航需要无人机的位置信息、姿态等,在空旷的室外环境,一般需要基于GNSS系统进行位置信息的获取与无人机导航。 …
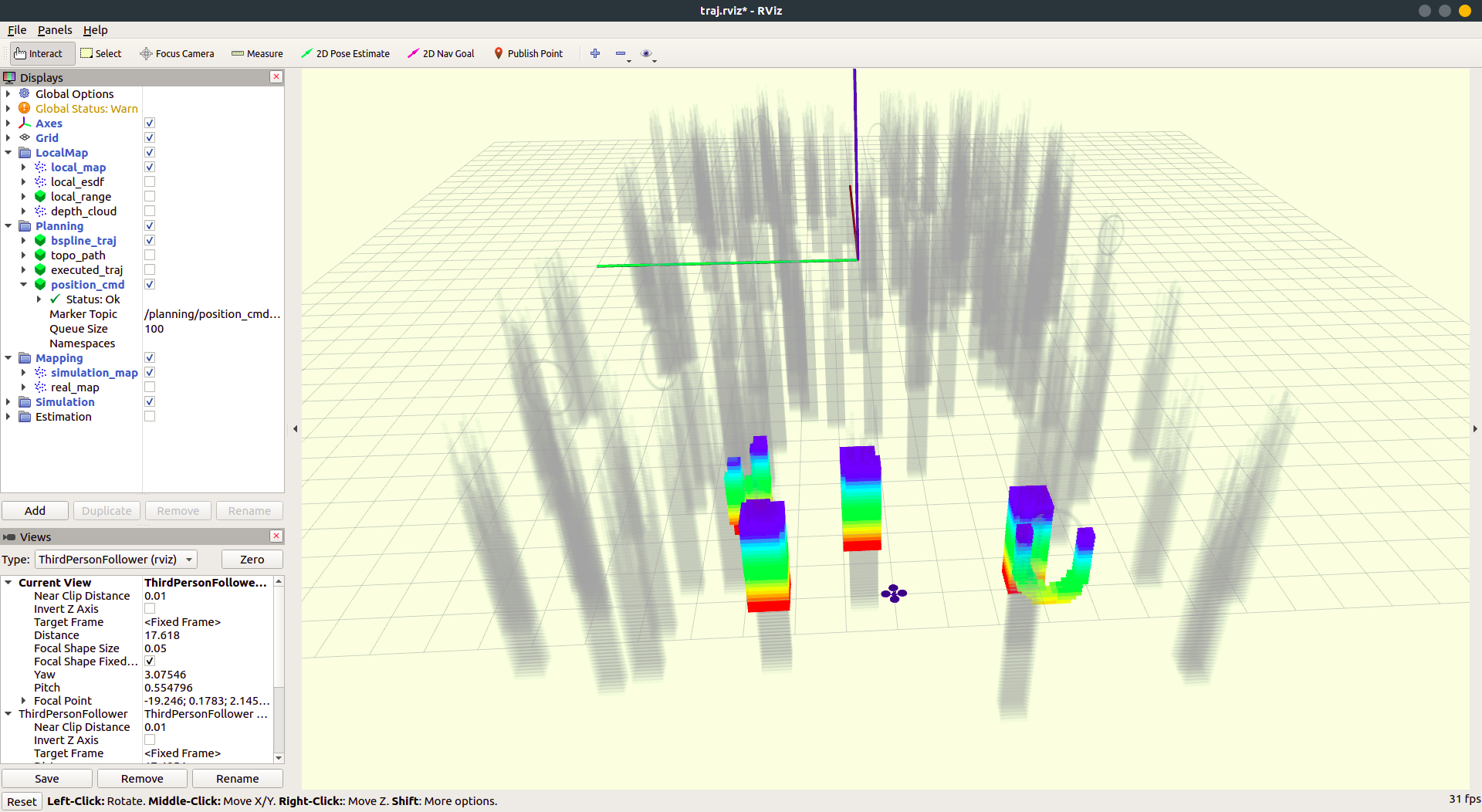
发布于 2021-03-01 【无人机自主导航2-快速路径规划】ubuntu18.04港科大Fast-Planner路线规划避障算法项目搭建 GanAHE 1144 热度 无~ 学习历程 一、前导:基本环境搭建 Ubuntu18.04配置搭建基于Gazebo的虚拟仿真平台(Px4):无人机(UAV)、无人车等模拟实验 …
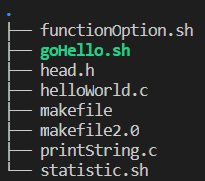
发布于 2020-12-28 Linux下GCC编译C/C++程序两种手段 GanAHE 329 热度 无~ Linux 一、测试文件说明 root@ws-tkpjiq-0:~/linuxLearn/gccTes# ls *.c *.h head.h …
发布于 2020-11-21 【Linux】GCC编译并执行C/C++程序 GanAHE 342 热度 无~ Linux 1. 简答题 (1)一个 C/C++程序从开始到生成可执行的二进制文件至少需要经过哪四个步骤? (2)如何用 gcc 将源程序 h …