一、前导:基本环境搭建
Ubuntu18.04配置搭建基于Gazebo的虚拟仿真平台(Px4):无人机(UAV)、无人车等模拟实验平台
如果需要VMware16下已构建好的虚拟机文件,等待后续文章。
二、编译
在/home中新建droneMes文件夹作为工作空间:
sudo apt-get install libarmadillo-dev ros-melodic-nlopt
cd droneMes/src
git clone https://github.com/HKUST-Aerial-Robotics/Fast-Planner.git
cd ../
catkin_make在执行catkin_make时报错:
CMake Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by "pcl_conversions"
with any of the following names:
pcl_conversionsConfig.cmake
pcl_conversions-config.cmake
Add the installation prefix of "pcl_conversions" to CMAKE_PREFIX_PATH or
set "pcl_conversions_DIR" to a directory containing one of the above files.
If "pcl_conversions" provides a separate development package or SDK, be
sure it has been installed.
Call Stack (most recent call first):
Fast-Planner/uav_simulator/map_generator/CMakeLists.txt:8 (find_package)
-- Configuring incomplete, errors occurred!
See also "/home/ganahe/droneMes/build/CMakeFiles/CMakeOutput.log".
See also "/home/ganahe/droneMes/build/CMakeFiles/CMakeError.log".
Invoking "cmake" failed
解决:
sudo apt-get install ros-melodic-navigation
sudo apt-get install ros-melodic-pcl-conversions
sudo apt-get install ros-melodic-pcl-ros2.2 启动Rviz模拟
打开新的终端,定位到上一布建立的工作空间(cd /home/droneMes/)并执行:
source devel/setup.bash && roslaunch plan_manage rviz.launch
打开新终端,定位到工作空间,并执行:
source devel/setup.bash && roslaunch plan_manage kino_replan.launch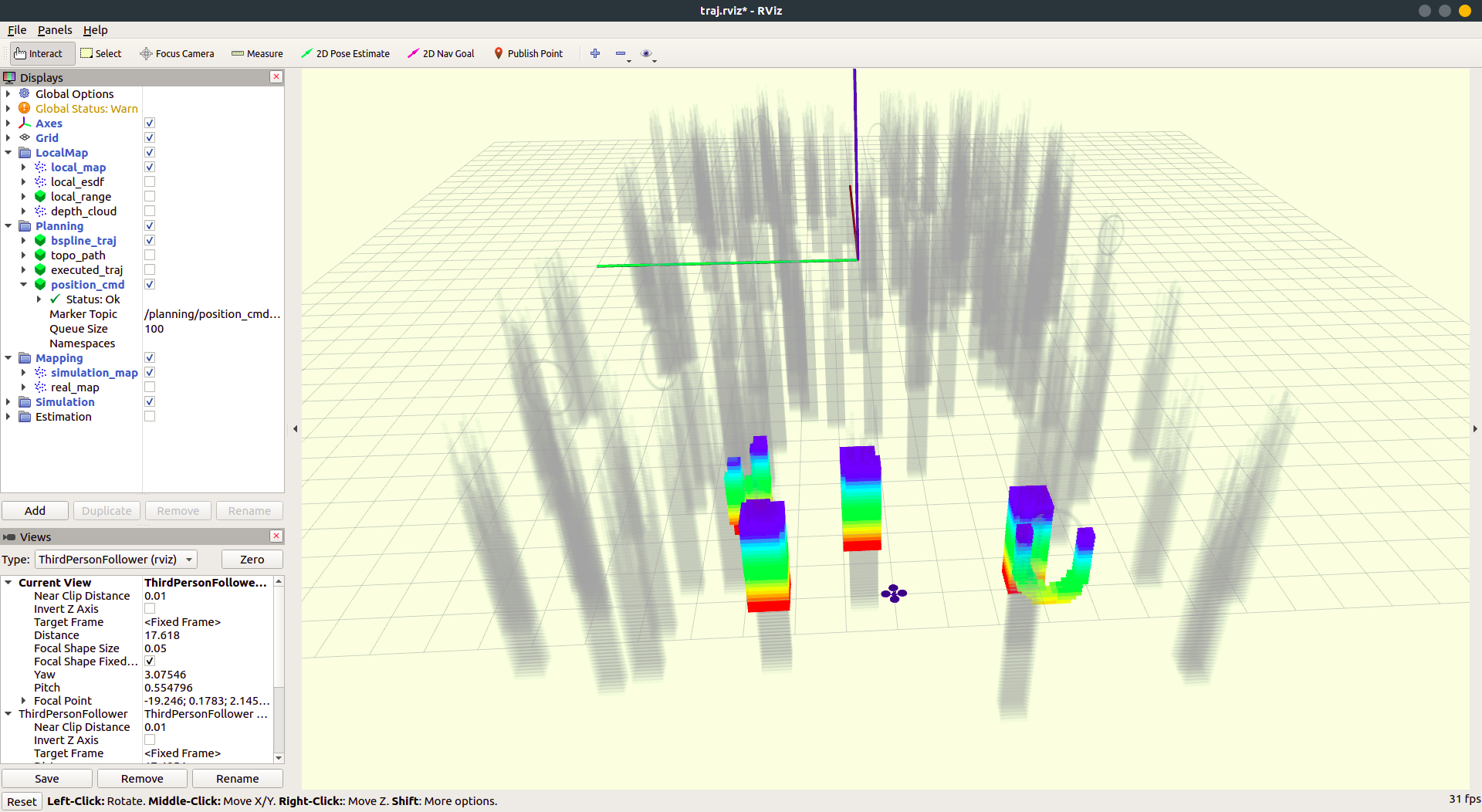
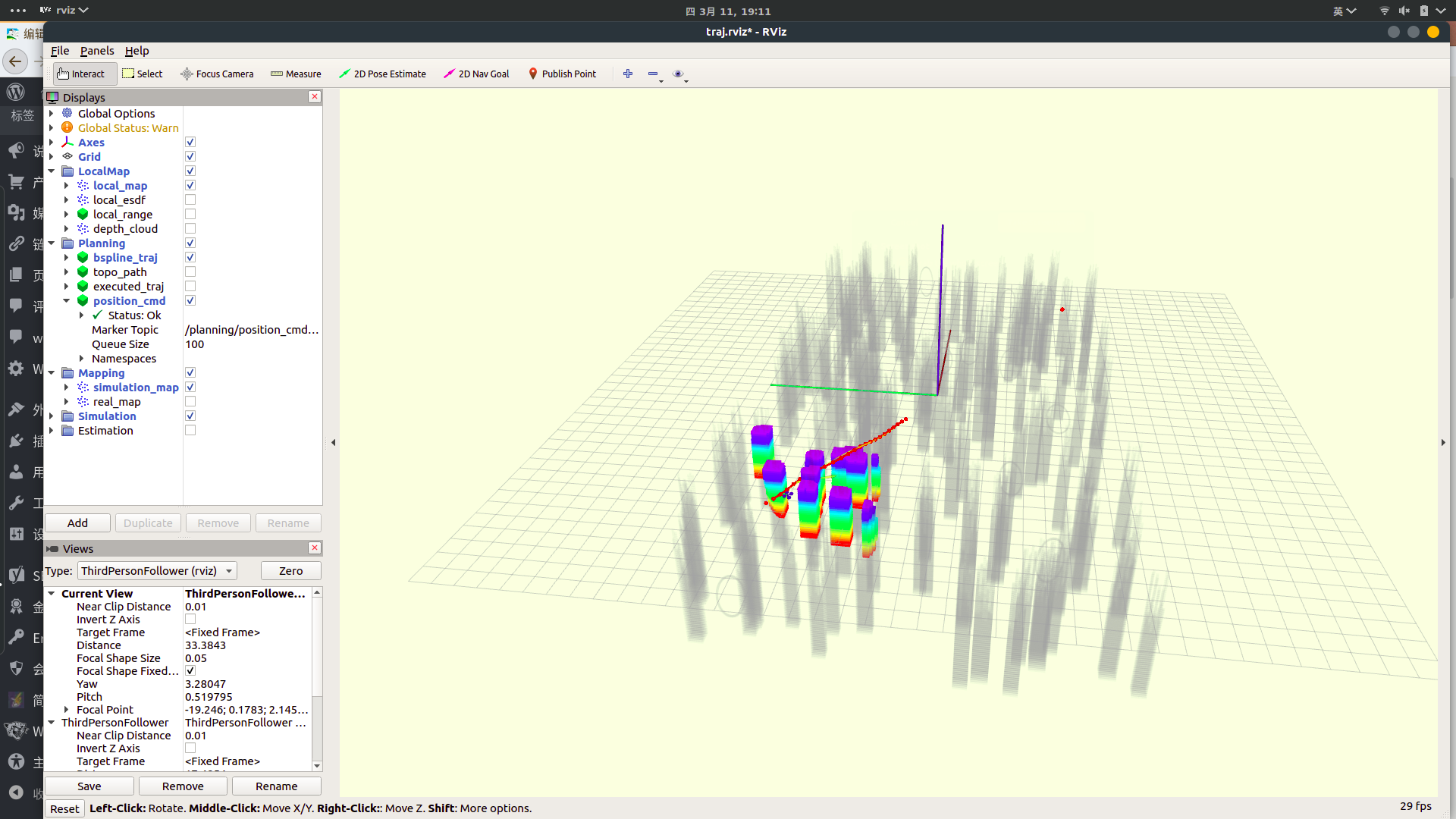
点击2D Nav Goal选定目飞行目标,即可实现基本的模拟工作。
参考文献
[1]18.04跑港科大Fast-Planner--错误解决(pcl_conversions、在/usr/local/lib中无法找到libnlopt.so、PLUGINLIB_DECLARE_CLASS)
Comments NOTHING