一、需求
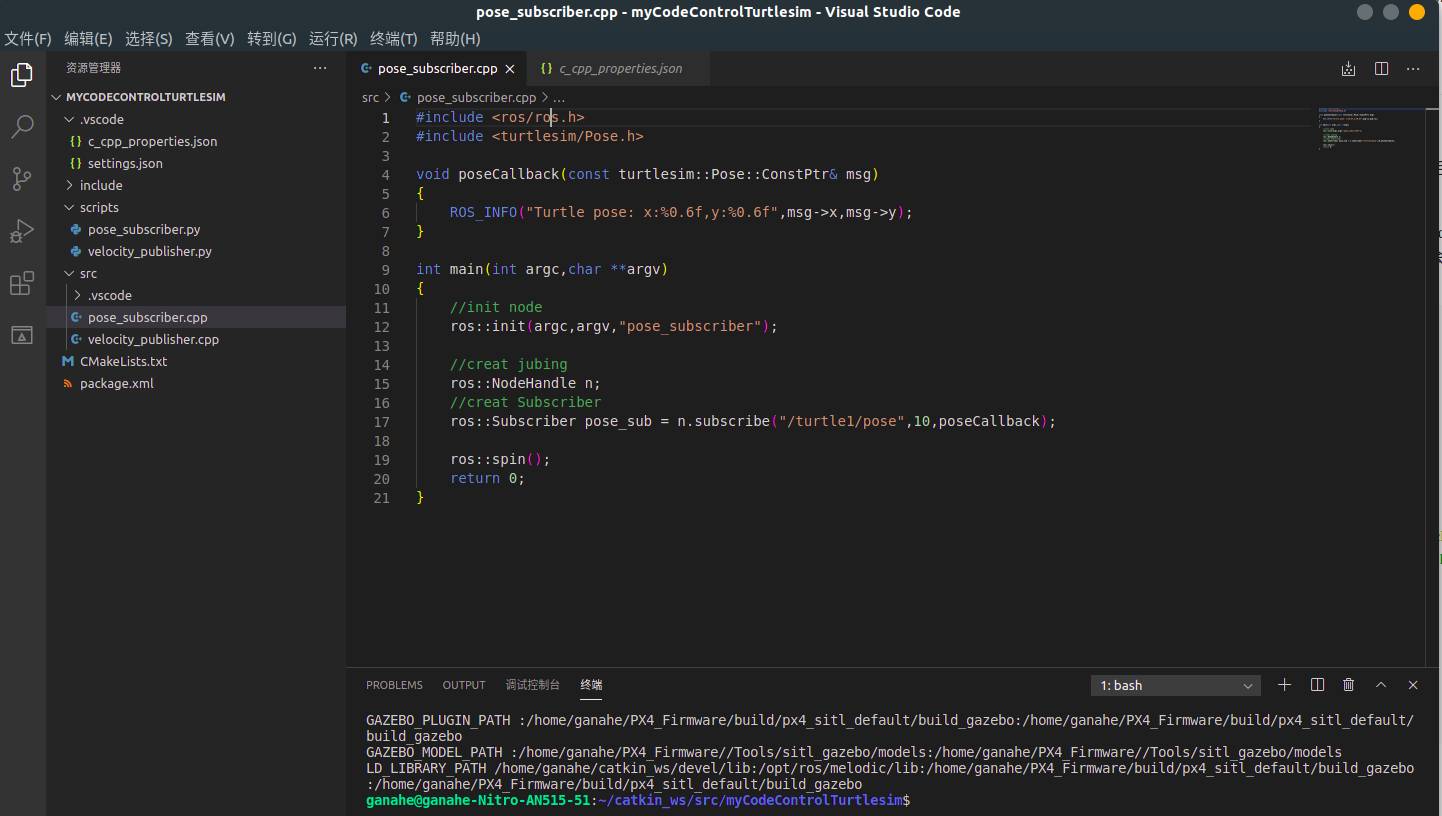
Ubuntu18.04下采用VSCode编写ros melodic代码,编写功能包package源代码文件时,如果没有做好配置,在导入:#include <ros/ros.h>头文件时会报错,无法运行且不能实现代码提示就比较难受。
## 二、配置VSCode
-
vscode中
Ctrl+P; -
在弹出的输入框内键入
ext install ms-iot.vscode-ros后按回车,开始下载扩展插件;
下载完成后即可正常使用。 -
如果
#include<ros/ros.h>仍然报错,则鼠标放在include一行,点击旁边出现的灯泡-编辑 “include path”设置 - c_cpp_properties.json选项,vscode会自动在配置文件夹中新建.vscode/文件夹,同时在里面初始化了c_cpp_properties.json文件:{ "configurations": [ { "browse": { "databaseFilename": "", "limitSymbolsToIncludedHeaders": true }, "includePath": [ "/opt/ros/melodic/include/**", "/home/ganahe/catkin_ws/src/myCodeControlTurtlesim/include/**", "/home/ganahe/catkin_ws/src/myCodeServiceTurtlesim/include/**", "/usr/include/**" ], "name": "ROS" } ], "version": 4 }
按照自己的Ros版本及安装位置作出修改即可。
三、配置CMakeLists.txt
根据注释说明,将下述代码加入CMakeLists.txt的合适位置:
add_executable(项目名 src/项目名.cpp)
target_link_libraries(项目名 ${catkin_LIBRARIES})四、编译
回到catkin_ws工作空间,执行如下命令:
source /devel/setup.bash
catkin_make
Comments NOTHING